

Unmanned aerial vehicle autonomous landing system and landing method based on GPS and vision
An autonomous landing and UAV technology, applied in the field of UAV landing system based on GPS and vision, can solve the problems of insufficient landing accuracy and insufficient landing safety, and achieve the effect of improving landing accuracy and increasing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
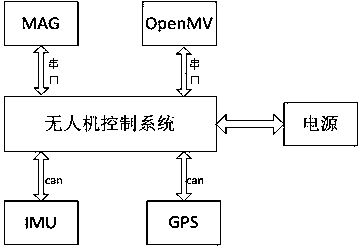
[0025] like figure 1 As shown, a kind of unmanned aerial vehicle autonomous landing system based on GPS and vision of the present embodiment, comprises unmanned aerial vehicle control system and the GPS module, MAG module, IMU module, openmv module, atmospheric pressure that are respectively connected with unmanned aerial vehicle control system Sensor module and power supply module; The GPS module is used to obtain longitude and latitude data in real time, and send to the UAV control system; The MAG module collects MAG data in real time and sends it to the UAV control system, for carrying out the UAV heading Control; the IMU module collects IMU data in real time and sends it to the drone control system for attitude control of the drone; the openmv module is used to capture environmental images, and the collected images are processed and converted to obtain The coordinate difference of the UAV relative to the landing position in the image; the atmospheric pressure sensor module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More