

Unmanned aerial vehicle landing method and device, unmanned aerial vehicle system, airport, equipment and medium
A UAV, landing point technology, applied in control/adjustment system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem of limited area, UAV can not land, UAV crash mission and other problems to achieve the effect of improving the landing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
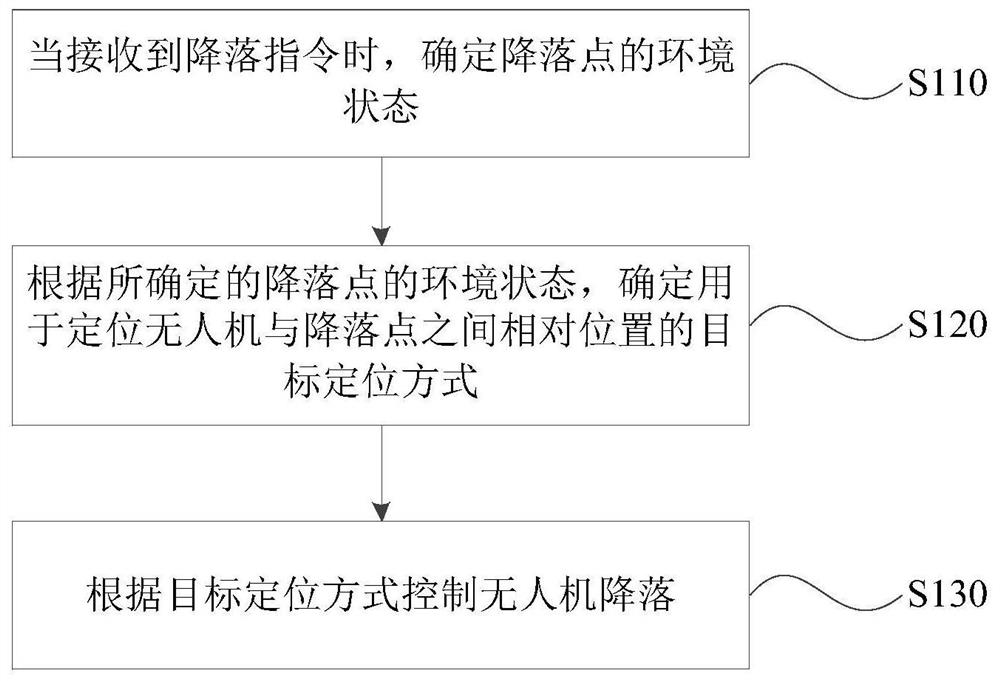
[0050] figure 1 It is a schematic flowchart of a drone landing method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the drone lands on an automatic airport take-off and landing platform at an automatic airport. The method can be executed by a drone landing device, and the device can be realized by software and / or hardware, and integrated into a device with control functions, such as an unmanned aerial vehicle system. The method specifically includes the following steps:
[0051] S110. Determine the environmental state of the landing point when the landing instruction is received.
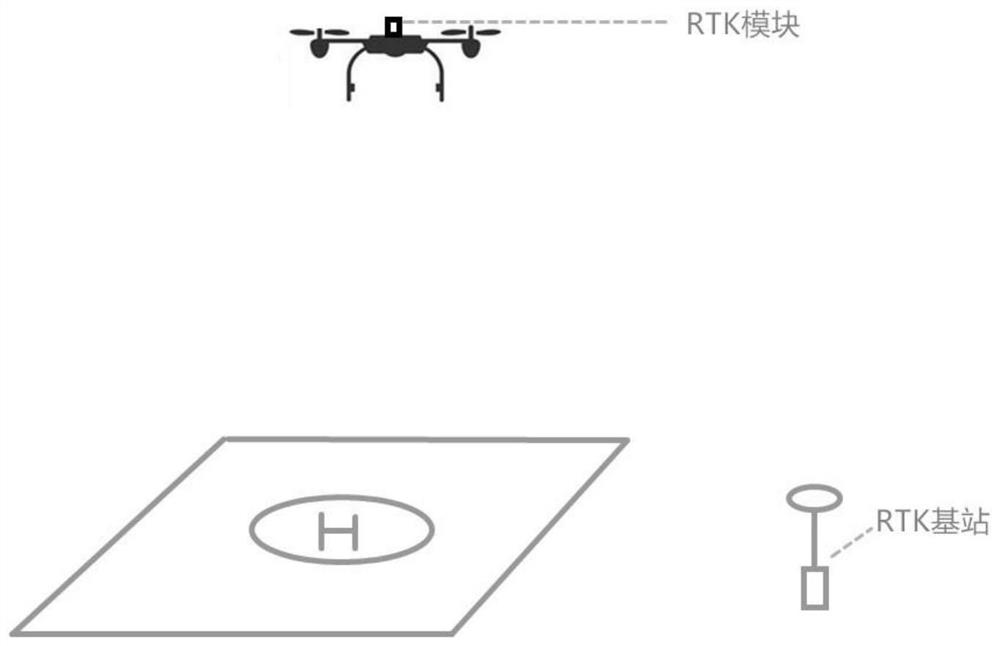
[0052] Wherein, the environmental state may include the light intensity of the area where the landing point is located, or the intensity of the RTK communication signal in the area where the landing point is located.
[0053] Specifically, determining the environmental state of the landing point includes:
[0054] Through the RTK communica...
Embodiment 2
[0077] Figure 4 It is a schematic flow chart of a UAV landing method provided by Embodiment 2 of the present invention. This embodiment has been further optimized on the basis of the above-mentioned embodiments, specifically adding the following steps: when the UAV takes off, the RTK The positioning method determines the coordinates of the take-off point of the drone, and determines the coordinates of the take-off point as the landing point. The advantage of this optimization is that a more accurate landing point position can be obtained, which is conducive to the precise landing of the UAV to the landing point. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0078] see Figure 4 , the drone landing method provided in this embodiment specifically includes the following steps:
[0079] S210. When the drone takes off, determine the coordinates of the takeoff point of the drone by means of RTK posi...
Embodiment 3
[0089] Figure 5 It is a flow chart of a drone landing method provided by Embodiment 3 of the present invention. This embodiment continues to optimize the scheme on the basis of the above embodiments, specifically for the use of two-dimensional code identification and positioning methods or infrared signal calibration methods. , the process of locating the landing of the UAV is refined, and the explanations of terms that are the same as or corresponding to those in the above-mentioned embodiments will not be repeated here. like Figure 5 Shown, described UAV landing method comprises the steps:
[0090] S310. When receiving the landing instruction, determine the environmental state of the landing point;
[0091] S320. According to the determined environmental state of the landing point, determine that the target positioning method for locating the relative position between the UAV and the landing point is a two-dimensional code identification positioning method or an infrared...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More