

AGV navigation positioning method for container loading
A navigation positioning and container technology, applied in the field of intelligent logistics, can solve the problems of high cost, increased inconvenience, and positioning markers are easily affected by the environment, and achieve the effect of low cost and accurate navigation operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
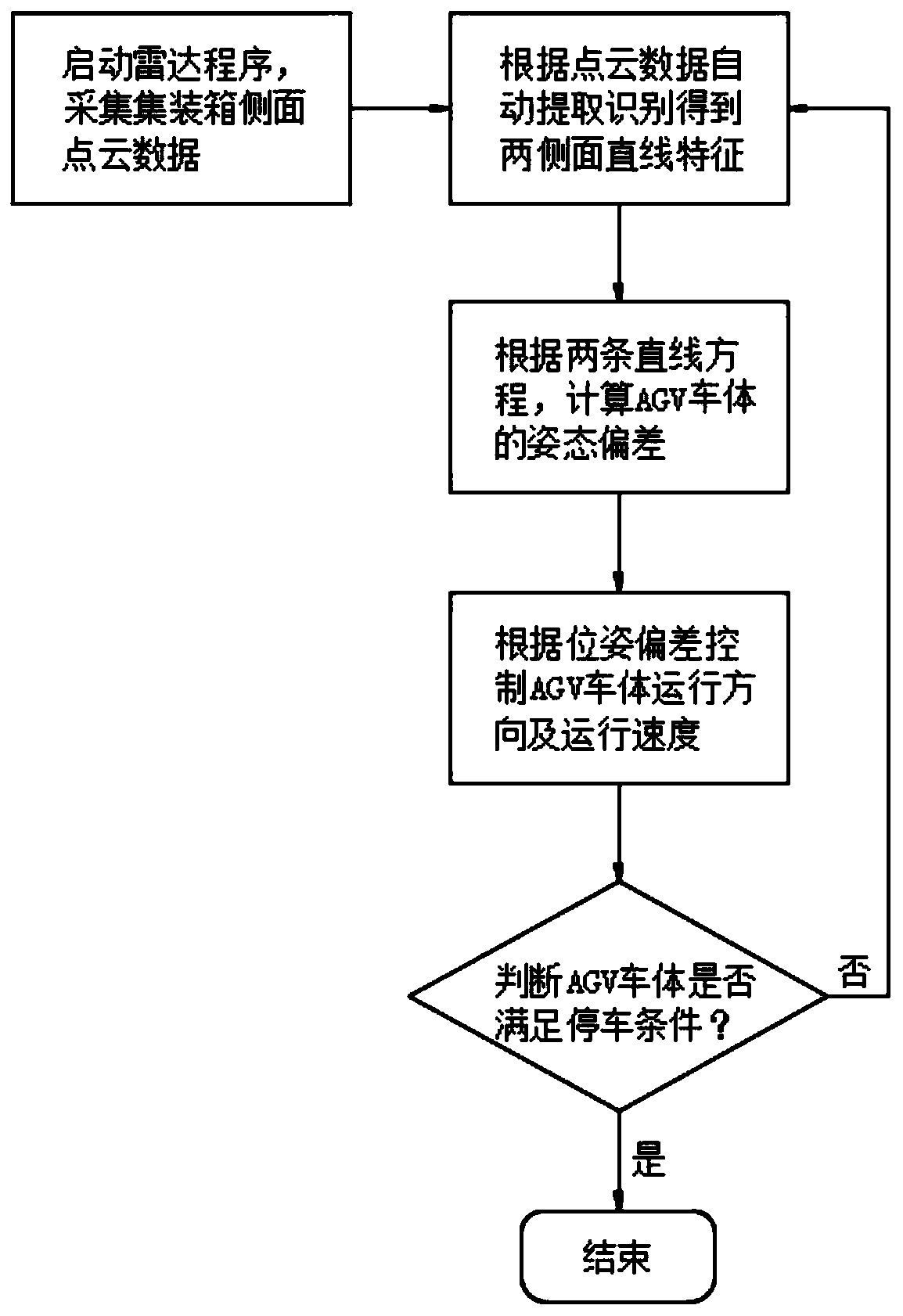
[0030] refer to figure 1 Shown, a kind of AGV navigation positioning method for container loading, the method comprises the following steps:
[0031] Install a lidar directly above the AGV, where the X-axis of the physical coordinate system of the lidar coincides with the central symmetry axis of the car body;
[0032] The automatic guided transport vehicle walks along the central axis of the container, and the laser radar collects the point cloud data inside...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More