

Walking control method and device of biped robot, storage medium and terminal
A biped robot and walking control technology, applied in the field of electronics, can solve the problems of affecting the recognition of black lines, reducing the accuracy of walking routes, and the inability of biped walking robots to accurately identify road signals.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
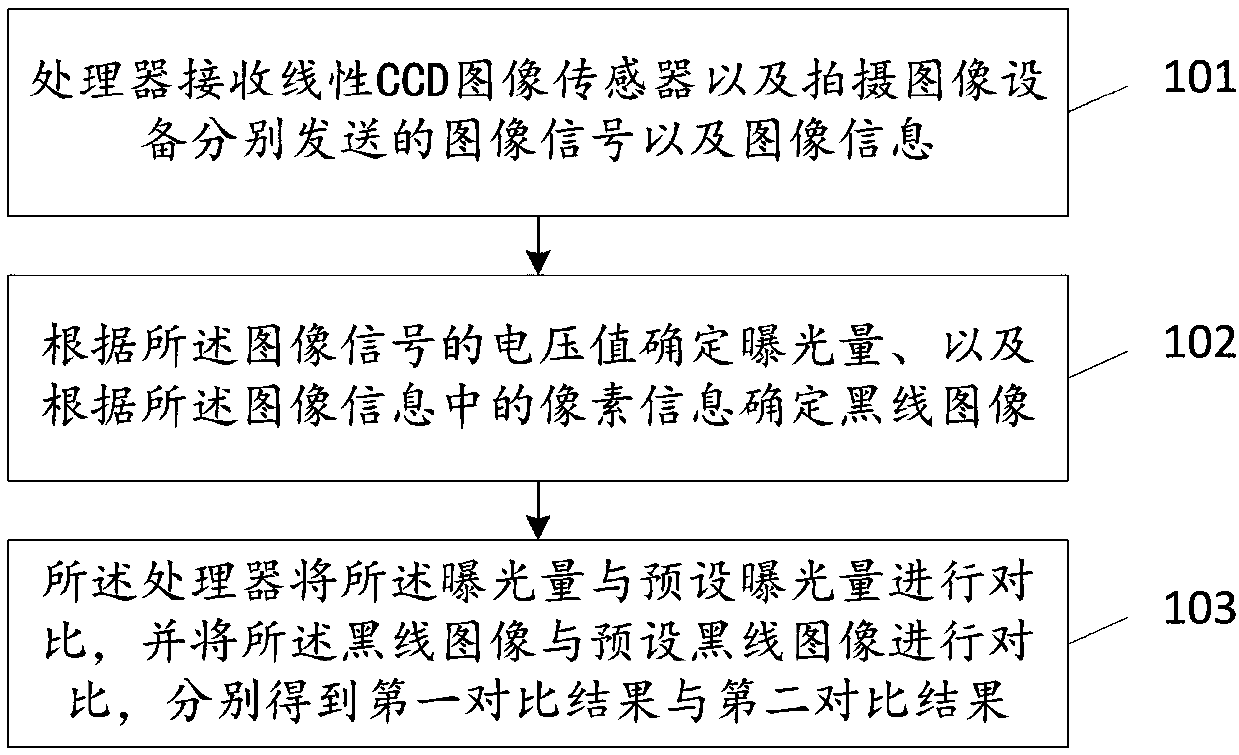
[0043] An embodiment of the present invention provides a walking control method for a biped robot, such as figure 1 As shown, the method includes:
[0044] 101. The processor receives image signals and image information respectively sent by the linear CCD image sensor and the image capturing device.
[0045]Wherein, the processor can be a single-chip microcomputer module for processing various signals received, and the STM32F407 s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More