A distributed sensing underwater vehicle and its drive control method
An underwater vehicle and a technology for an underwater vehicle, which is applied in the directions of underwater ships, underwater operation equipment, instruments, etc., can solve the problems that the underwater robot is difficult to adapt to the fluid movement and the movement is unstable.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with accompanying drawing.
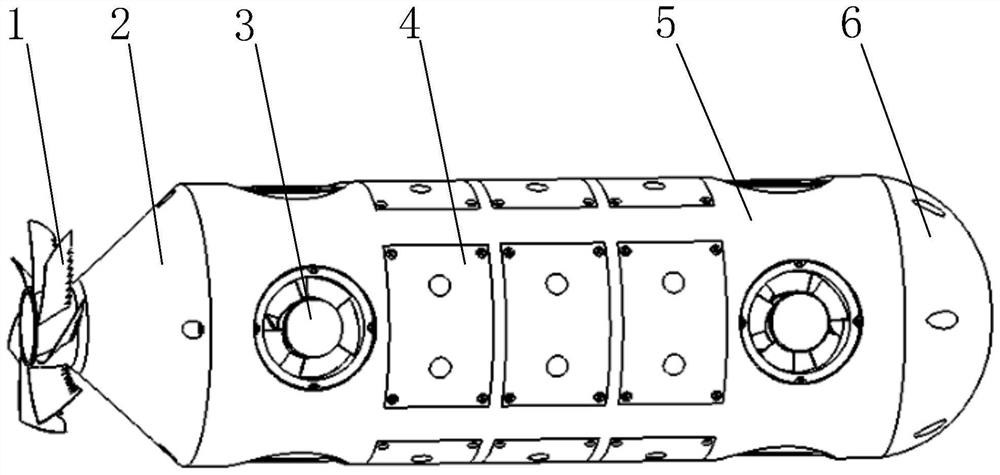
[0037] Such as figure 1 As shown, a distributed sensing underwater vehicle includes a main body of the vehicle, a terminal thruster 1, a side thruster 3, a distributed sensing unit 4 and a control module. The main body of the aircraft includes an aircraft tail 2 , a fuselage 5 and an aircraft head 6 arranged in sequence. The aircraft tail 2 is fixed on the fuselage 5 by bolts. The fuselage 5 is cylindrical and has a chamber inside, and a control module is installed in the chamber. The aircraft head 6 is hemispherical and fixed with the head end of the fuselage by bolts. The terminal thruster 1 is installed on the outer end of the tail 2 of the aircraft, and is used to provide the power required for the advancement of the aircraft, and is mounted on the tail 2 of the aircraft. Both ends of the outer wall of the fuselage 5 are provided with sets of mounting slots. The mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More