

Uncertain multi-agent system consistency control method based on non-uniform quantification
A multi-agent system and control method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult to implement accurately, less satisfactory information exchange, avoid bandwidth constraints, The effect of reducing the communication burden and improving the robust control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with the accompanying drawings.
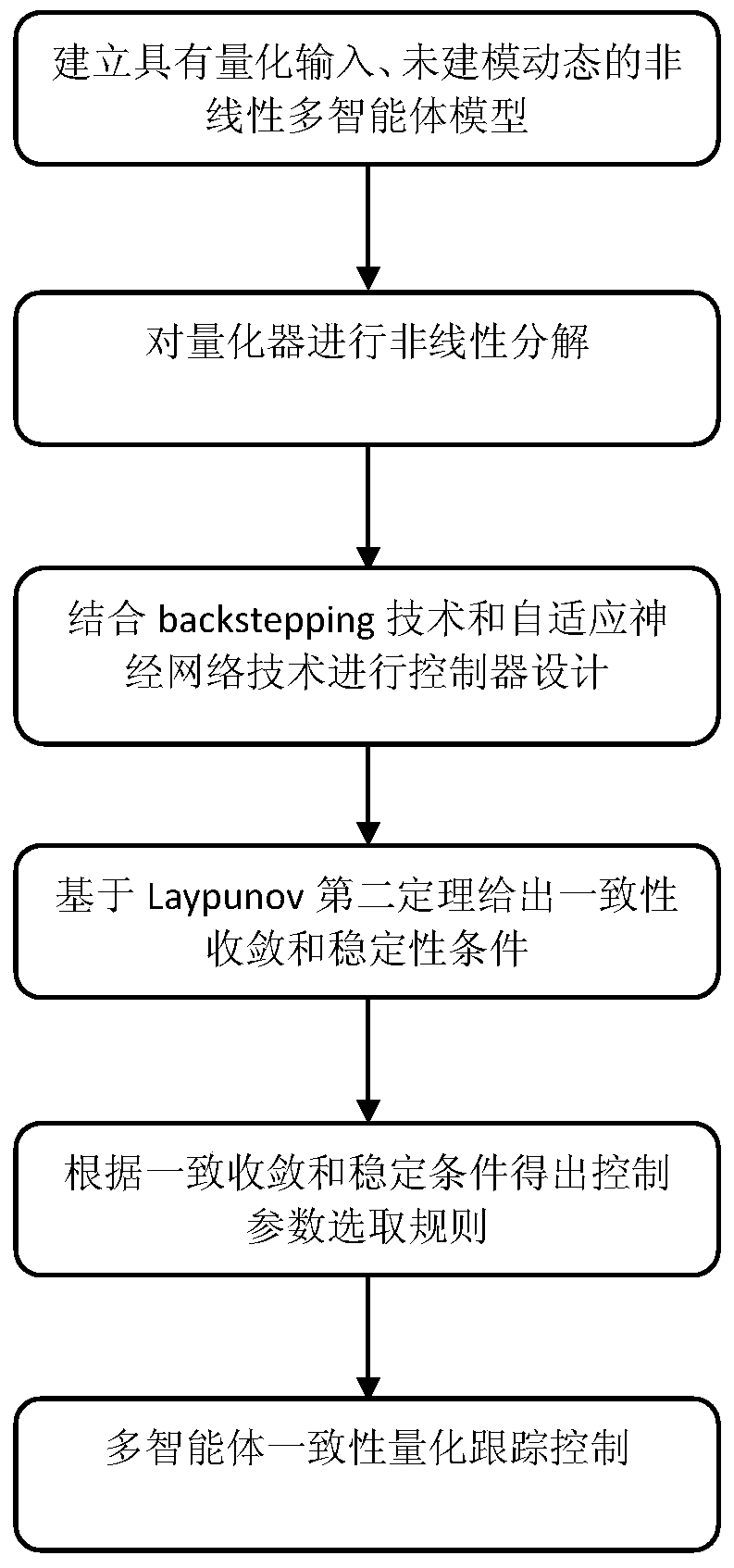
[0048] refer to Figure 1 to Figure 7 , a consensus control method for uncertain multi-agent systems with non-uniform quantization, comprising the following steps:
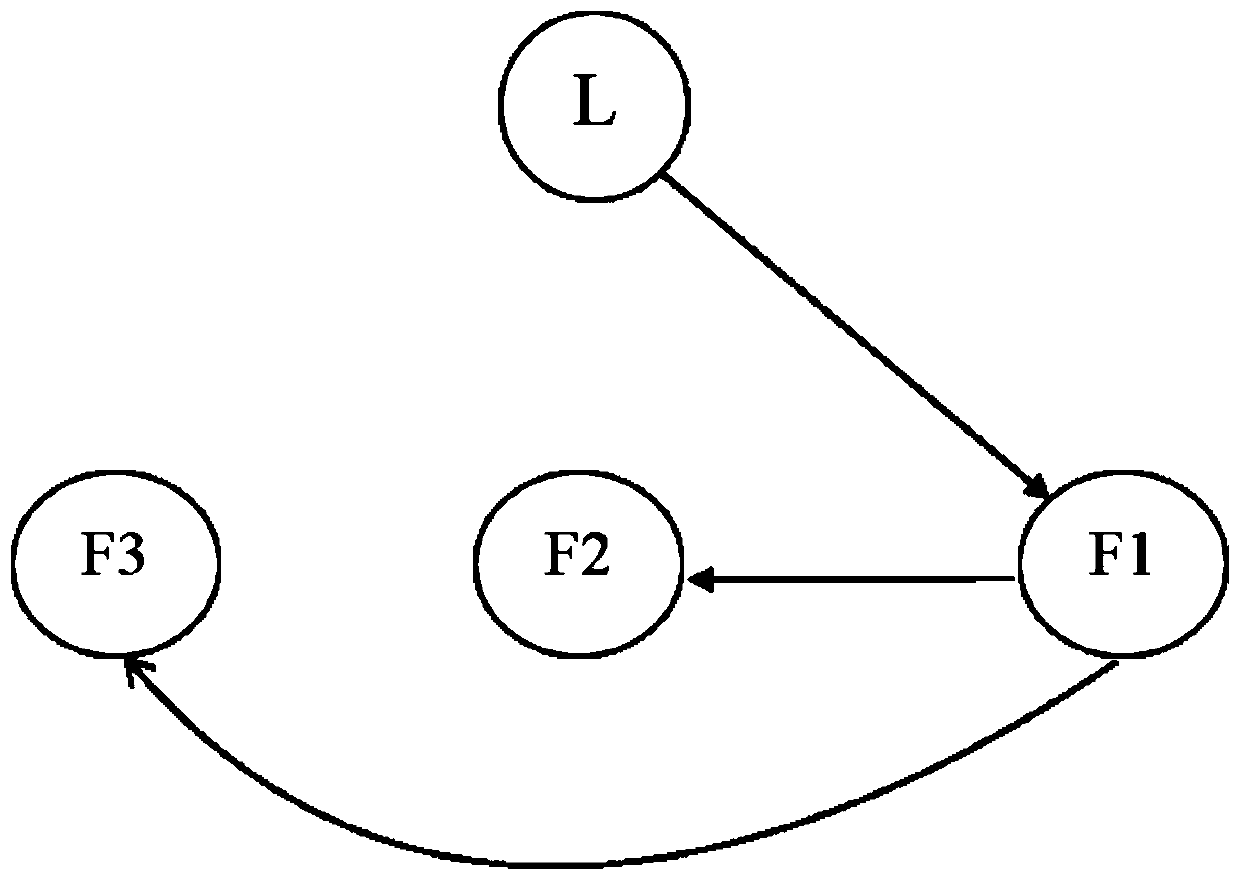
[0049] Step 1: In this embodiment, consider a multi-agent system composed of four nodes, the communication topology diagram is as follows figure 2 shown. Among them, node L is the leader, node F 1 , F 2 , F 3 for followers.
[0050] Establish a nonlinear high-order multi-agent system dynamic model with unmodeled dynamics, dynamic perturbations, and quantized inputs. The dynamic equation of the jth agent node is described as:
[0051]
[0052] where j=1,2,3, i=1,2; y j ∈R denotes the system output; q( ) and f j,i (·):R i →R is an unknown smooth function; g j,i (·)≠0 means that the unknown control gain is a nonlinear smooth function; Indicates the unmodeled dynamics; Δ j,i ( ) mean...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More