

Multi-motion mode moving parallel mechanism suitable for unstructured terrain and gait control method
A multi-motion mode, unstructured technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems that robots cannot adapt to complex and changeable environments, lack of precision, and complex control, to improve dynamic performance, Simple control and the effect of increasing structural rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The above and other features, properties and advantages of the present invention will become more apparent from the following description in conjunction with the accompanying drawings and embodiments, in which the same reference numerals represent the same features throughout, wherein:
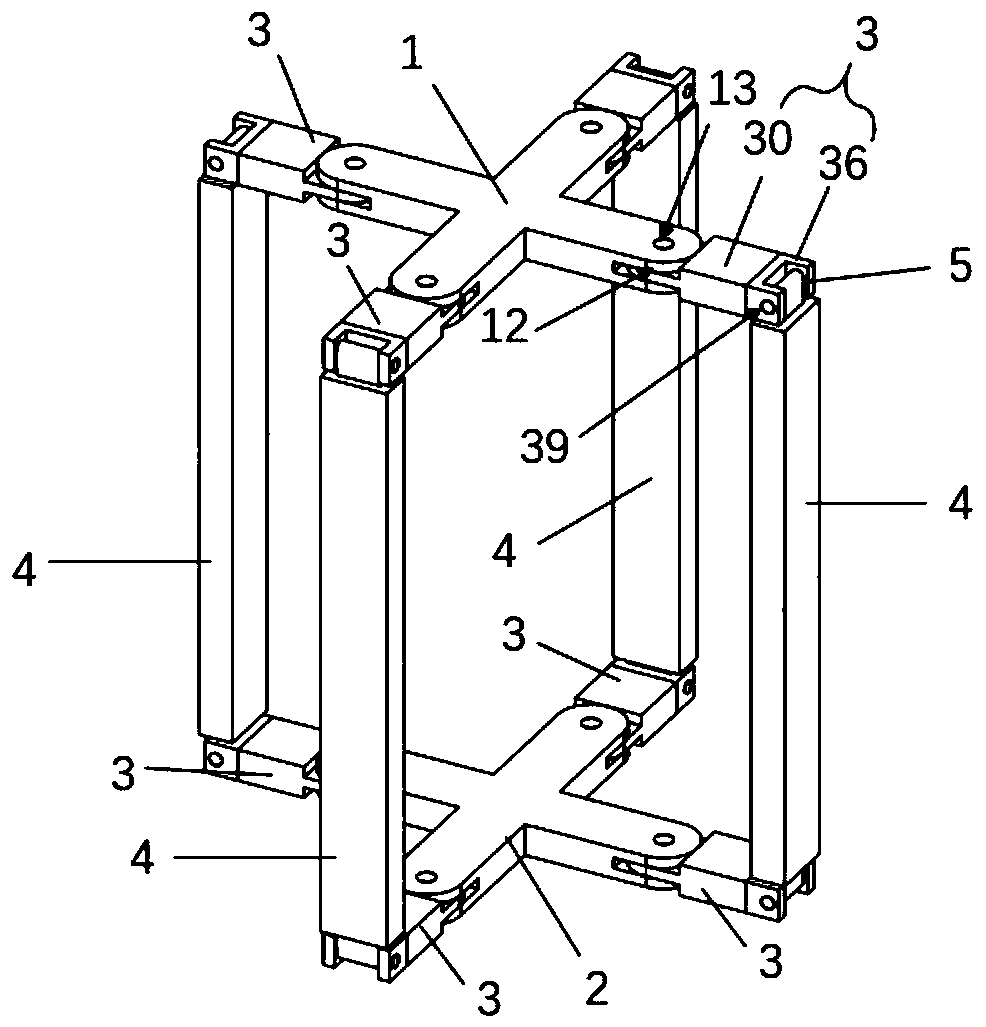
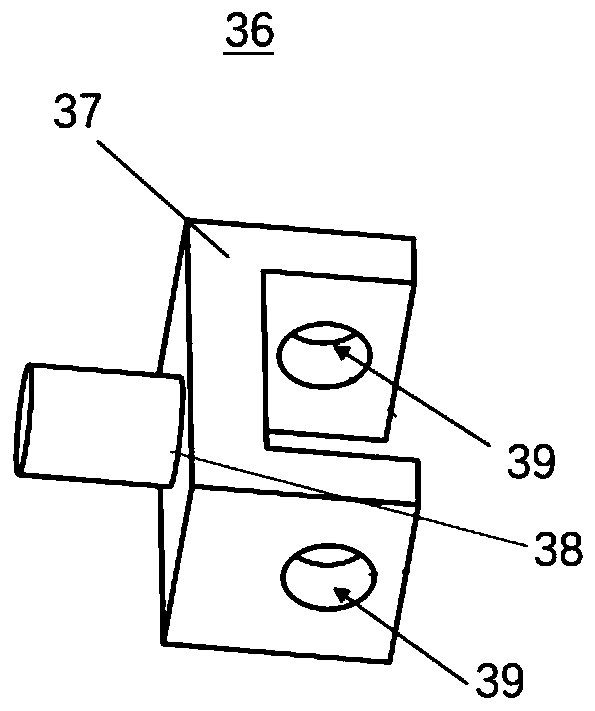
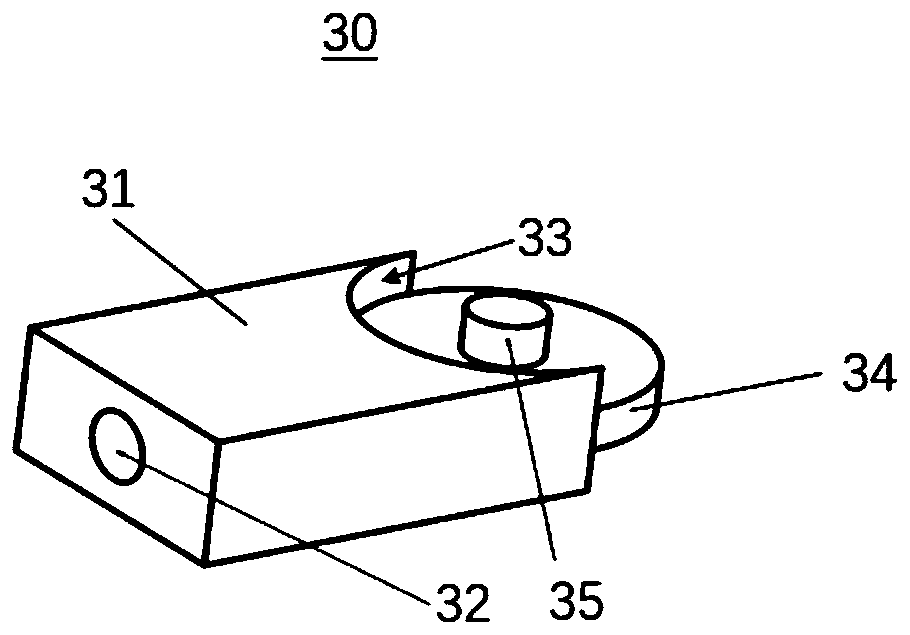
[0027] The object of the present invention is to provide a foldable multi-sports mode mobile parallel mechanism for the deficiencies of the prior art. refer to figure 1 and combine figure 2 with image 3 , a multi-motion mode mobile parallel mechanism, including an upper platform 1, a lower platform 2, a Hooke hinge assembly 3 and a connecting rod 4, and both the upper platform 1 and the lower platform 2 are cross-shaped components; wherein, the upper platform 1 and the lower platform The platforms 2 are arranged in parallel, and a Hooke hinge assembly 3 is installed on the ends of the upper and lower platforms, and one end of the Hooke hinge assembly 3 is movably connected with the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More