Flexible dexterous hand integrating negative pressure suction with bionic grabbing
A technology of dexterous hands and flexible fingers, which is applied in the field of flexible manipulators, can solve problems such as irregular shapes and difficult removal of tiny particles, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
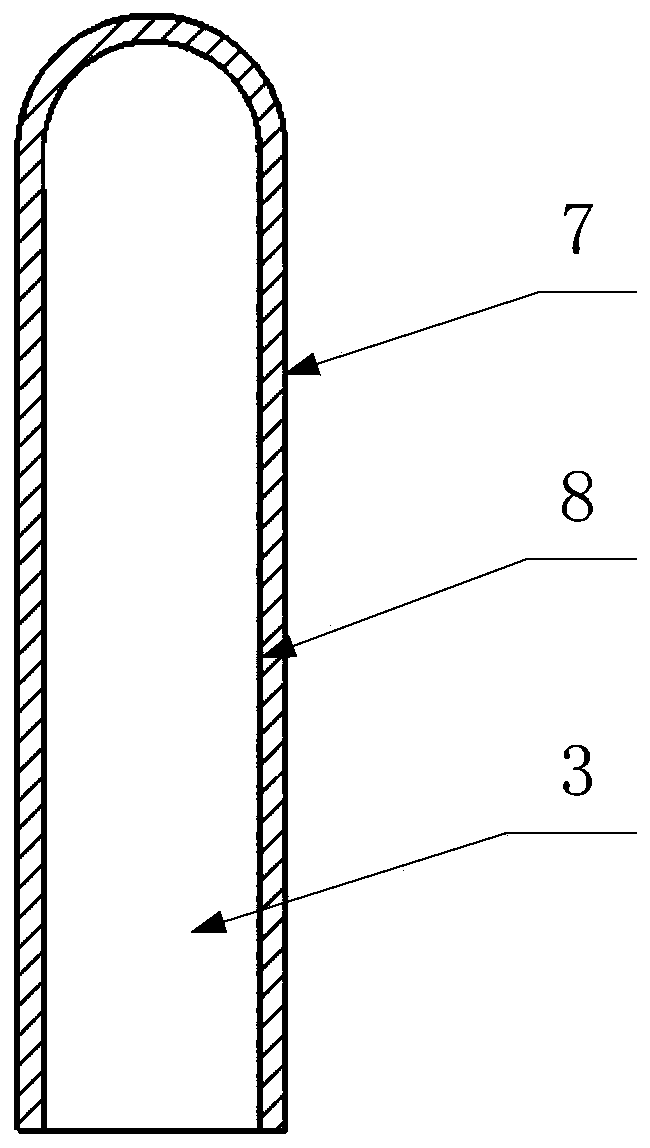
[0031] According to the preferred embodiment of the present invention, the flexible composite driver 8 can be prepared according to the following process:
[0032] Firstly, the dielectric elastomer is stretched. Preferably, the dielectric elastomer is first made into a film and then stretched. For example, the film can be stretched to a certain ratio in the surrounding direction, such as 3-6 times;
[0033] Then, a flexible electrode is adhered to the surface of the stretched dielectric elastomer film. Preferably, a layer of flexible electrode is adhered to the upper and lower surfaces of the film. According to requirements, the flexible electrode can be made into a specific shape, such as a rectangle, a trapezoid, or a square. Waveform, such a flexible electrode is suitable for subsequent winding and crimping;
[0034] Finally, the dielectric elastomer film adhered or coated with a flexible electrode layer is shaped, for example, corresponding to the shape of a finger, wound and cri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More