

Track Tracking Control Method of Unmanned Boat Based on Disturbance Observer and Fuzzy System
A technology of interference observer and track tracking, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of uncertain and inappropriate model of unmanned ship in fuzzy system, and ensure control stability , Improve control performance, good transient and steady-state response performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042]The present invention will be further described below with reference to the accompanying drawings.
[0043]In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It will be appreciated that the specific embodiments described herein are intended to explain the present invention and is not intended to limit the invention. Further, the technical features according to each of the various embodiments described below can be combined with each other as long as they do not constitute a collision between each other.
[0044]The present invention is further described with reference to the drawings:
[0045]The technical solution of the present invention is:
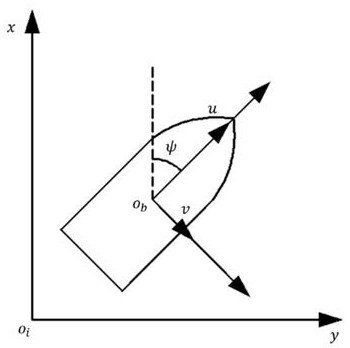
[0046]Step 1: Derify the nonlinear dynamics model of the drowboat:
[0047]
[0048]
[0049]Among them, τ represents the control input of the drownboat. M0Indicates the inertia matrix of the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More