

Omnibearing detection mechanical arm special for mining robot
A technology of manipulator and robot, which is applied in the field of all-round detection manipulator for mining robots. It can solve the problems such as the inability to realize the rotation in the direction, and achieve the effect of simple and detachable installation, increasing economic benefits, and light and small appearance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the present invention. .
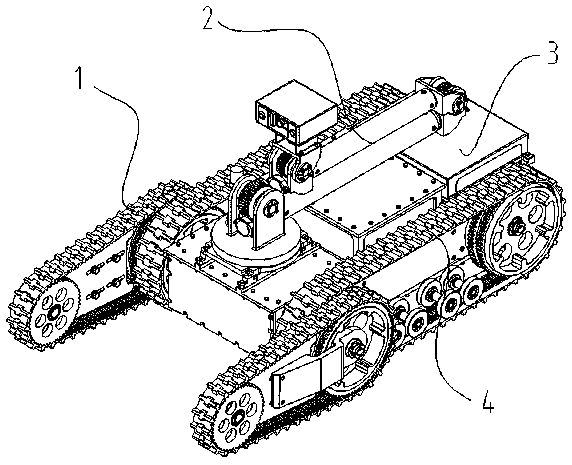
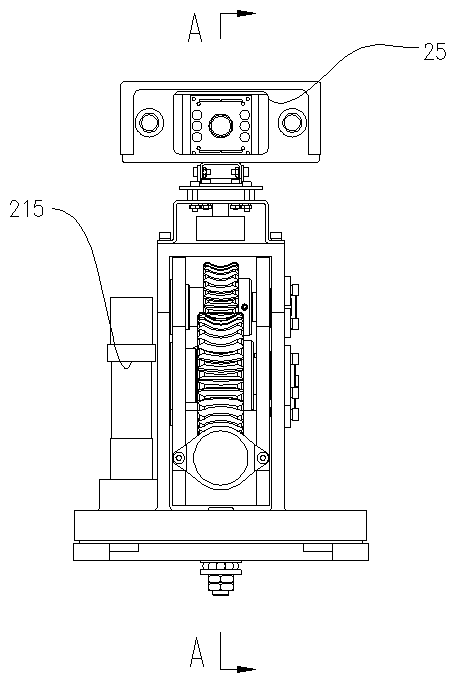
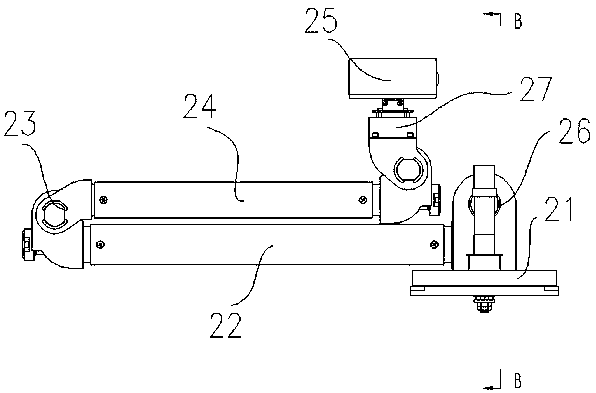
[0039] Such as Figure 1-Figure 8 Shown, the concrete structure of the present invention is:
[0040] A special all-round detection mechanical arm for mining robots. The mechanical arm 2 is arranged on the upper surface of the carriage 3 of the crawler-type mining robot. The mechanical arm 2 is fixed on the carriage 3 through the chassis 21. The mechanical arm 2 is composed of a plurality of foldable The free end of the end support arm is provided with a detection head 25 for collecting downhole images and / or on-site environmental parameters. In this embodiment, the detection head 25 can simultaneousl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More