

Improved SURF mobile robot image matching method
A technology of mobile robot and matching method, which is applied in the field of image matching of improved SURF mobile robot, can solve problems such as redundant and useless calculations, matching errors, etc., and achieve the effects of reducing computational complexity, high matching accuracy rate, and excellence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
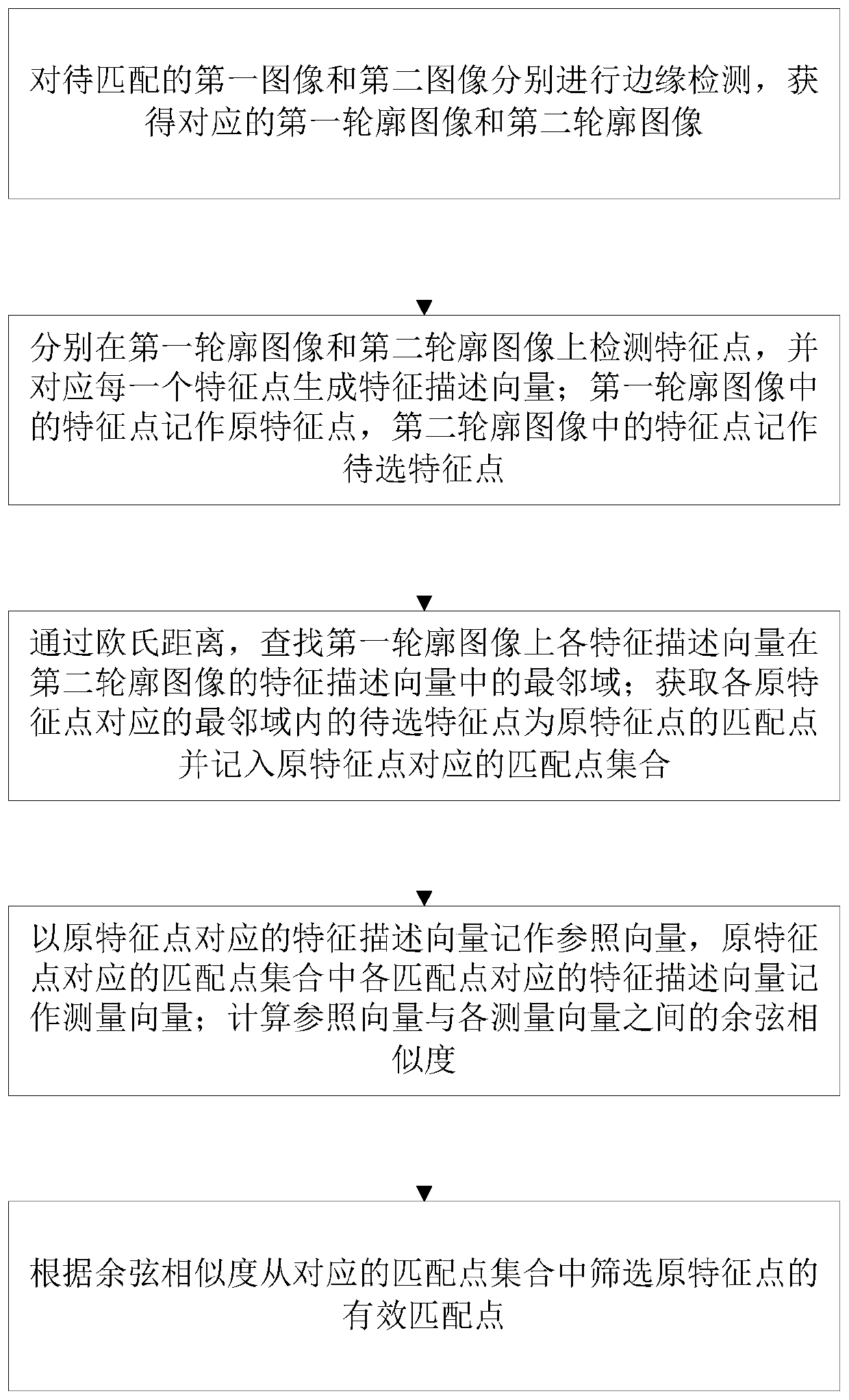
[0029] refer to figure 1 , a kind of improved SURF mobile robot image matching method that the present invention proposes, comprises the following steps.
[0030] H1. Perform edge detection on the first image to be matched and the second image respectively, and obtain the corresponding first contour image and the second contour image.
[0031] Specifically, in this embodiment, the first contour image and the second contour image are respectively extracted from the first image and the second image through Canny edge detection and edge detection. During specific implementation, first obtain the first image and the second image after Gaussian filtering, and then the specific method of obtaining the first contour image from the first image and the second contour image from the second image is: first, through the finite difference of the first-order partial derivative Calculate and find the intensity gradient of the image; then apply the non-maximum suppression technique to elimin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More