Path optimization method for multi-unmanned aerial vehicle cooperative inspection task
A multi-UAV, inspection task technology, applied in the field of UAV, can solve the problems of low quality of inspection task completion and unoptimized UAV path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention are clearly and completely described. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. example. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0065] The embodiment of the present application provides a heterogeneous multi-UAV collaborative task assignment and path optimization method.
[0066] The technical solution in the embodiment of the present application is to solve the above-mentioned technical problems, and the general idea is as follows:
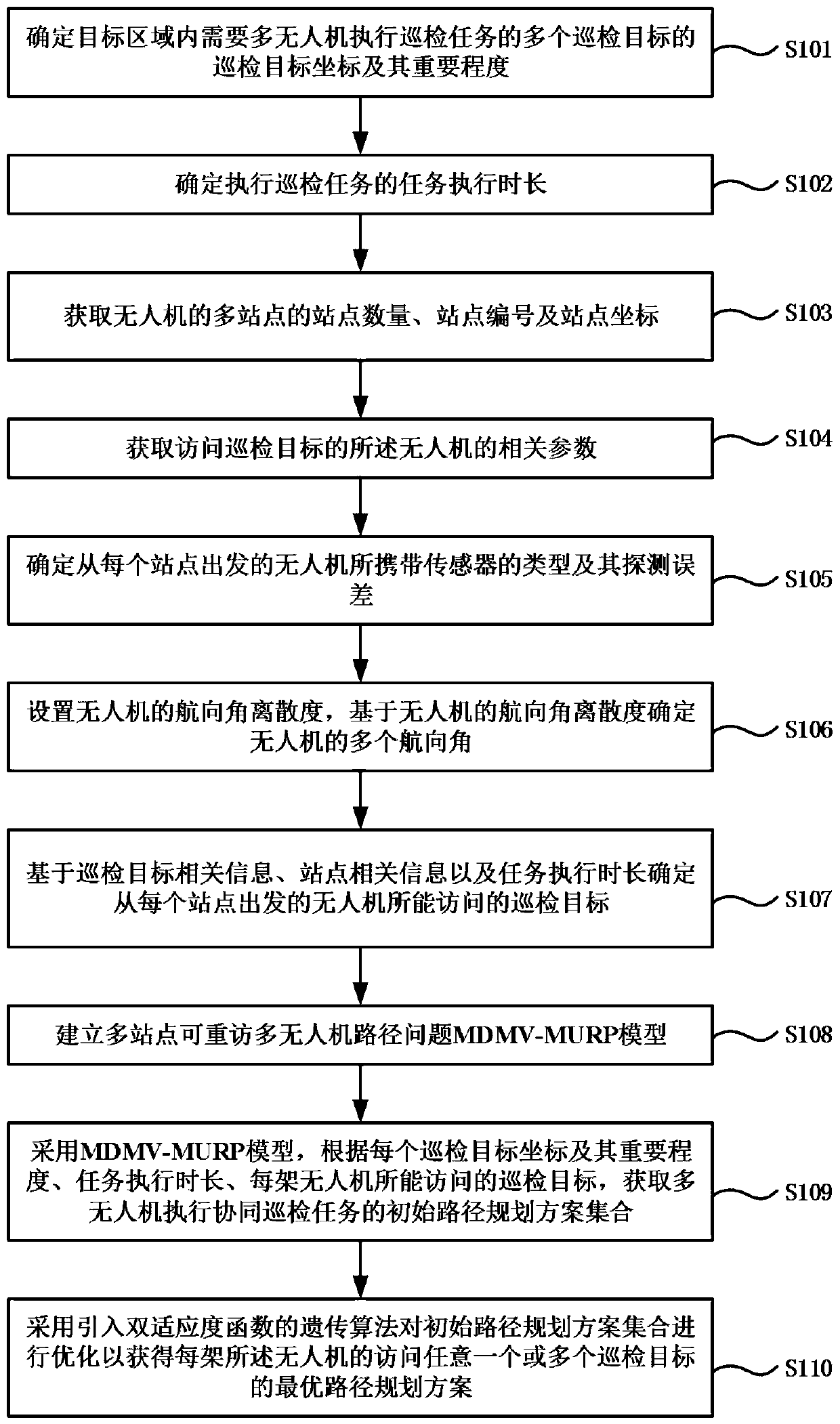
[0067] First determine the relevant parameters of multiple inspection targets that require multiple UAVs to perform in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More