Multi-target cooperative tracking method based on vehicle-to-vehicle communication
A vehicle-to-vehicle communication, multi-target technology, applied in the direction of re-radiation of electromagnetic waves, utilization of re-radiation, measurement devices, etc., can solve the problem of untrackable data delay and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The technical solutions of the present invention will be further explained in detail in conjunction with the accompanying drawings and specific embodiments, but the scope of protection of the present invention is not limited to the following examples.
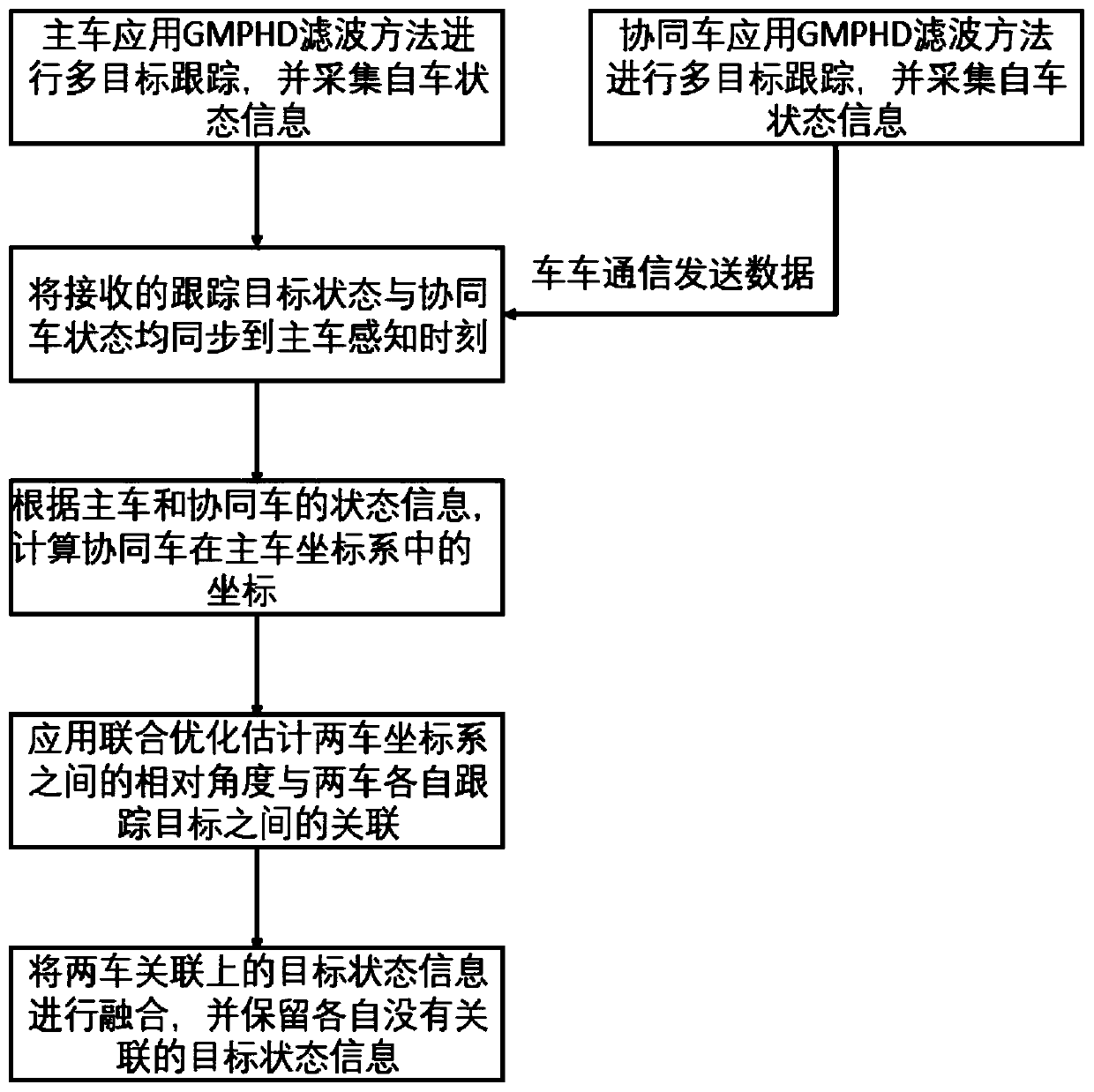
[0065] It is set that all vehicles participating in the collaborative target tracking are equipped with GPS positioning equipment and wireless communication modules. GPS collects information such as the position, speed, and heading angle of the own vehicle. The vehicle-to-vehicle communication adopts DSRC or LTE communication protocol; The party of the vehicle is called the main vehicle, and the party that sends the vehicle-to-vehicle communication content is called the cooperative vehicle. Each vehicle can be used as both the main vehicle and the cooperative vehicle.
[0066] In the embodiment, there are two target cars Car1 and Car2 in front of the main car. These three cars are driving in the same lane, and Car1 is in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More