

A four-wheel steering method for four-wheel independent drive electric vehicles
A four-wheel independent drive and four-wheel steering technology, which is applied to electric vehicles, electric steering mechanisms, power steering mechanisms, etc., to achieve the effect of improving mobility and improving active safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] By the following Figure 1-4 , The case of the embodiment of the present invention will be described in detail.
[0024] The present embodiment provides a four-wheel driving electric vehicle independently of the method for steering, four wheel steering vehicle, can effectively improve the safety performance of vehicles active improve steering maneuverability and handling stability. And the development of four-wheel independent drive electric vehicles for the car's four-wheel steering presents new possibilities.
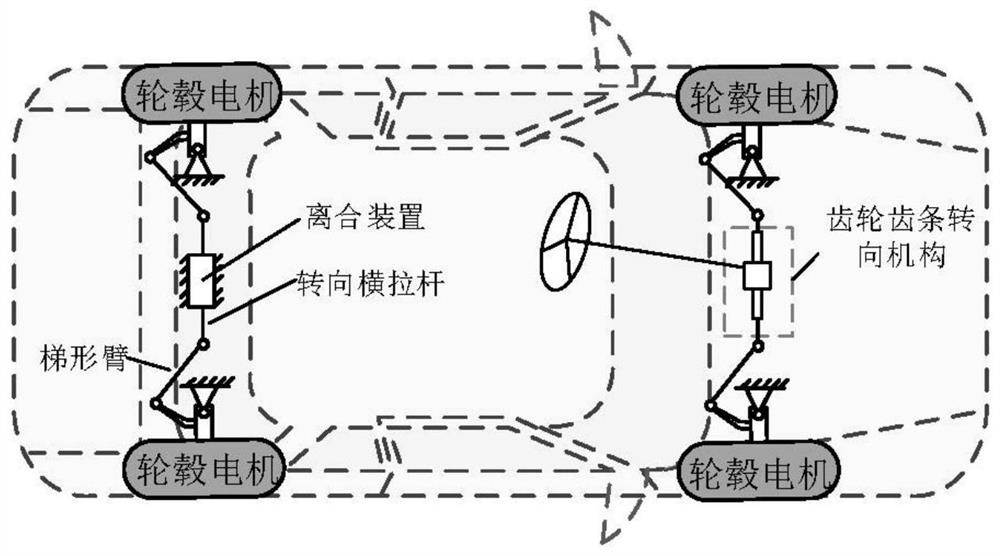
[0025] One driving electric vehicle based on the steering four-wheel motor vehicle, such as structural diagram figure 1 Indicated.
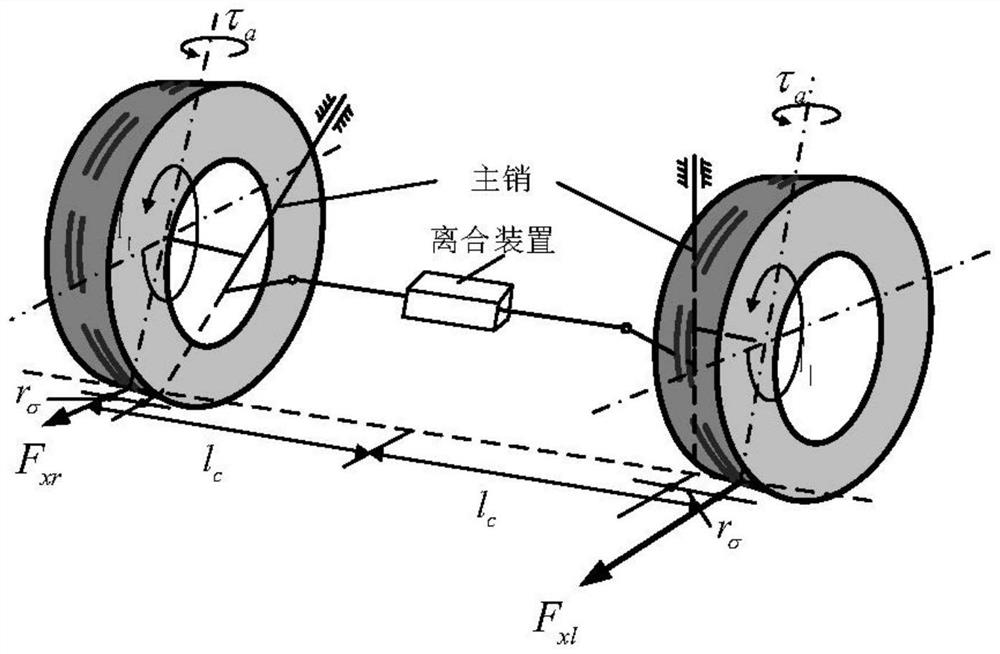
[0026] Wherein the rear wheel differential steering principle as FIG. figure 2 , In which τ a Aligning torque to the tires, l c Half of the track, r σ Based offset pin, F xf And f xr Are the driving force of the left wheels and right wheels, T f T r Respectively the left wheels and right wheels of the drive torque, the steering system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More