Method for planning coordinated path of dual-arm space robot based on random sampling
A space robot and path planning technology, which is applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of manipulator speed limit, time loss, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0052] The implementation of this invention mainly comprises following three steps:
[0053] Step 1. Kinematics modeling of the dual-arm space robot.
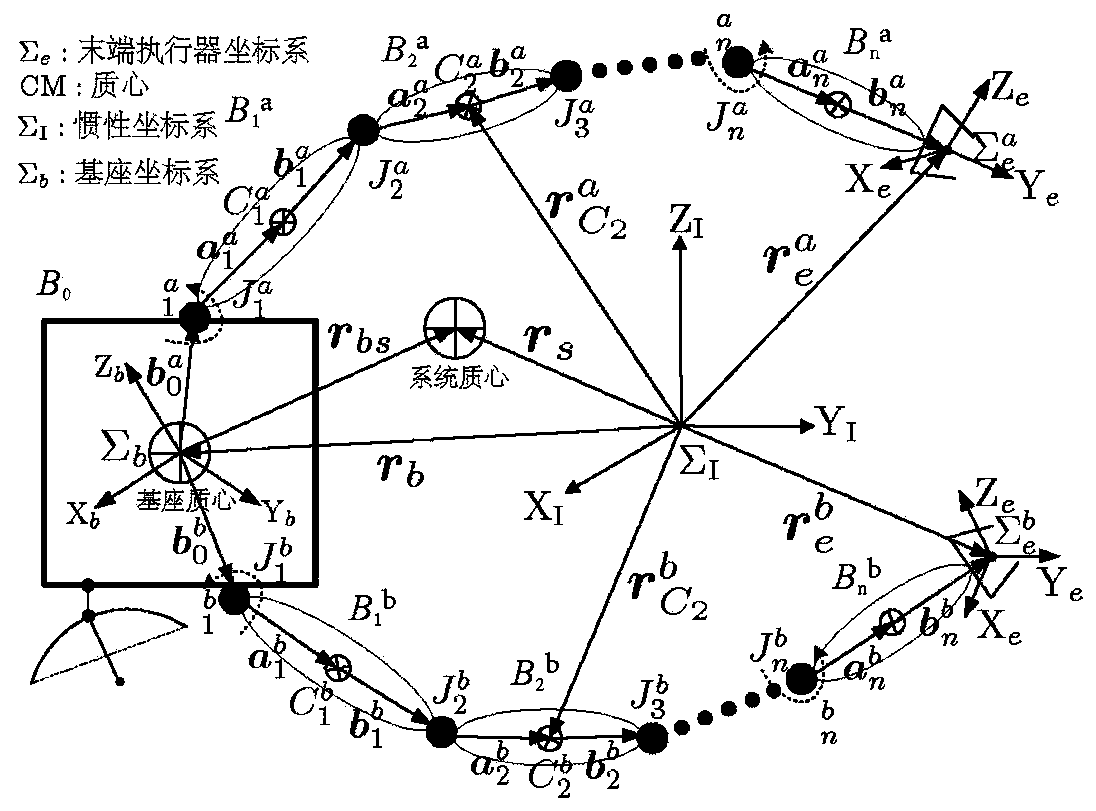
[0054] The dual-arm space robot system consists of a base and two n-degree-of-freedom robotic arms, with a total of 2n+1 rigid bodies, and the system is not affected by any external force. According to Poisson's formula, the kinematic equation of space robot is expressed as follows,
[0055]
[0056] Among them, superscripts a and b indicate that the variables belong to manipulators a and b, respectively. are the linear velocity and angular velocity vector of the base and the end effector, respectively, is the motion velocity of each manipulator joint. Unless otherwise specified, all vectors are expressed in the inertial coordinate system, and other symbols have been listed in Table 1.
[0057] According...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com