

A multi-rotor UAV inspection path planning method
A technology of multi-rotor UAV and inspection path, which is applied in the direction of navigation calculation tools, etc., and can solve the problem that there are few researches on full-coverage path planning methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings of the specification and specific preferred embodiments.
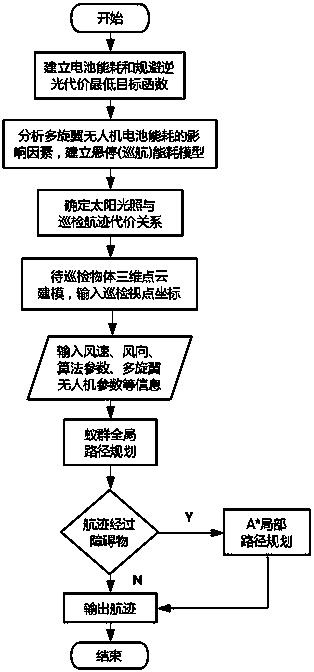
[0066] Such as figure 1 As shown, a multi-rotor UAV inspection path planning method is characterized in that the path planning is completed by improving the ant colony algorithm and the improved A* hybrid algorithm by taking the battery energy consumption and the lowest cost of avoiding backlighting as the objective function; Proceed as follows:
[0067] Step 1. In order to ensure the safety and low energy consumption of the inspection, establish the minimum objective function of battery energy consumption and avoiding backlight cost;
[0068] Step 2: Analyze the factors affecting the battery energy consumption of the multi-rotor UAV inspection and determine the hovering energy consumption and cruise energy consumption;
[0069] Step 3. Determine the relationship between the sun's illumination and the patrol track of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More