

Autonomous detection sonar multi-target DOA estimation method based on information fusion
An autonomous detection, multi-target technology, applied in the field of underwater acoustic detection, can solve problems such as inability to detect targets, inability to accurately detect weak targets or long-distance targets, and insufficient operating distance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0056] The present invention provides an autonomous detection sonar multi-target DOA estimation method based on information fusion, said method comprising the following steps:
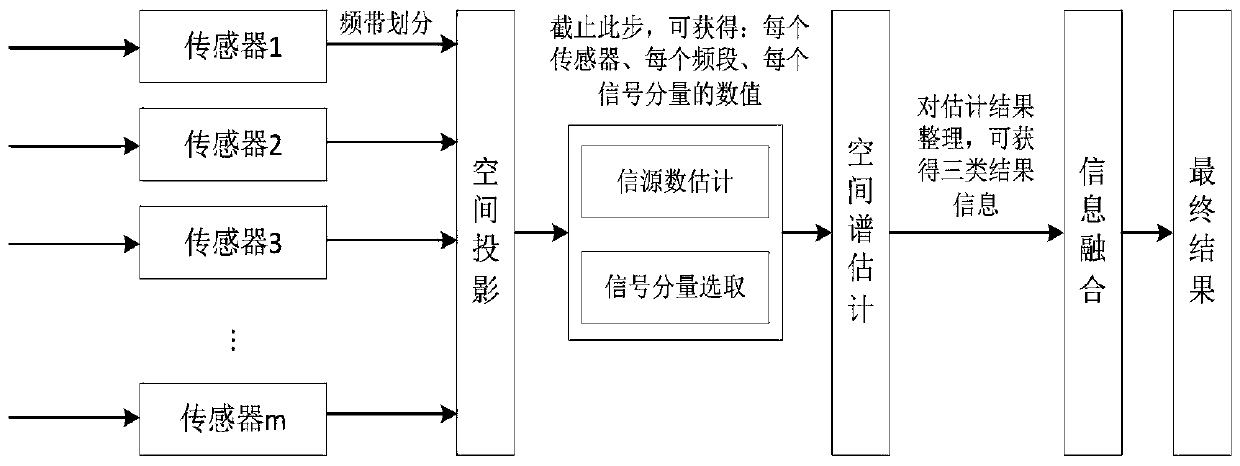
[0057] Step 1: Perform FFT processing on the channel data of each array element to obtain the frequency domain data corresponding to each array element, divide the frequency bands according to the narrowband conditions, and obtain the frequency band data of each channel;
[0058] Step 2: Combine the divided frequency band data of each channel according to the directivity of the vector array to obtain a covariance matrix;
[0059] Step 3: Projecting the covariance matrix to the characteristic subspace, using eigendecomposition to obtain the main eigenvector, selecting different signal components according to the eigenvalue sorting, and selecting the signal component;
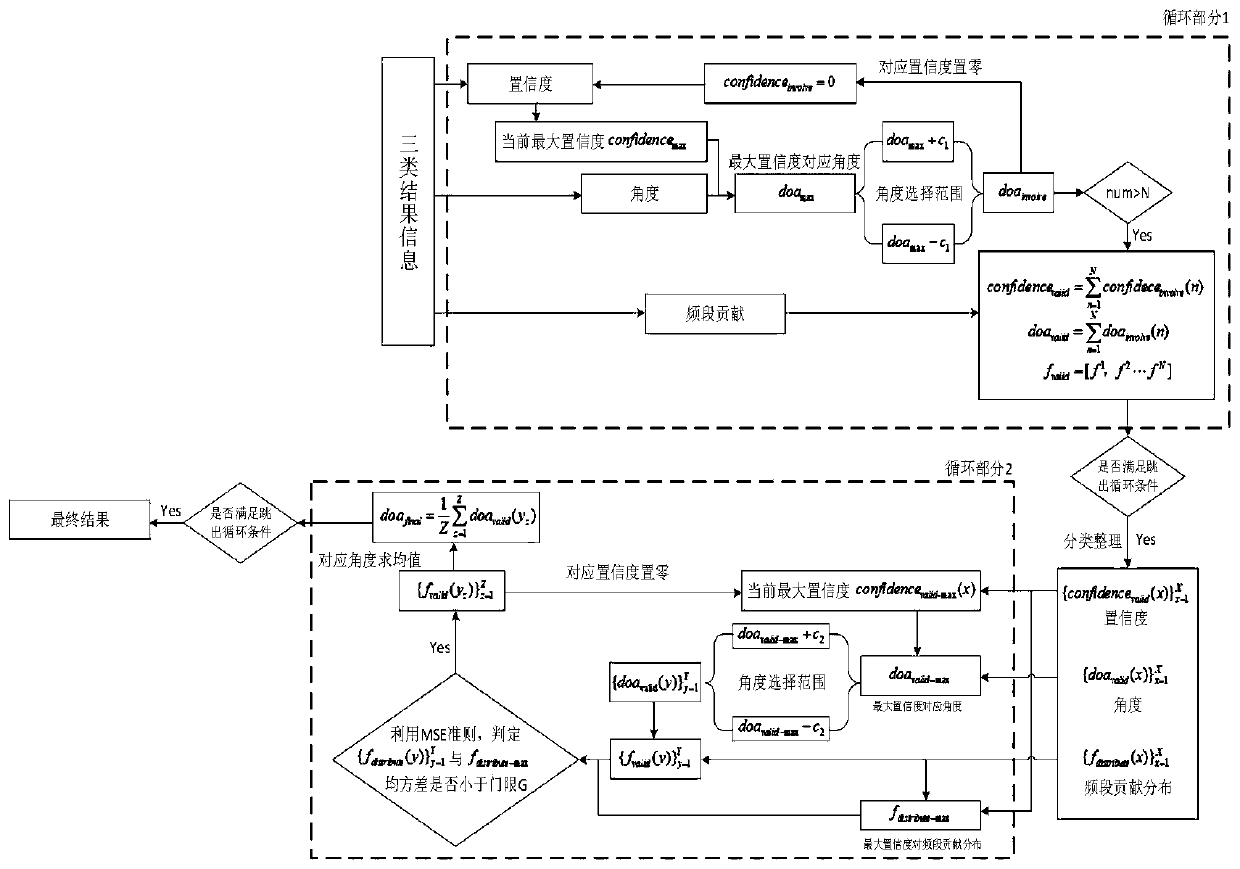
[0060] Step 4: Estimate the spatial spectrum of the signal component, record the maximum confidence of the signal component spatial spec...
specific Embodiment 2
[0111] In the mth sensor, the frequency band f received by the sensor is k The data of is projected to the signal subspace, and I signal components are selected Signal component U i Spectral estimation is performed in the angular search range Θ.
[0112]
[0113] in f received by sensor m k Frequency band data, the i-th signal component U obtained by projection i The estimated spatial spectrum, are L scanning angles, a(θ l ) is the angle θ l The corresponding steering vector. right Perform a peak search and select the largest peak. Here you can pre-set the threshold threshold to limit the spectral peaks, only keep the spectral peaks exceeding the threshold threshold, and record the spectral peak confidence, angle value, frequency band f k .
[0114] Combining the results of multiple sensors and multiple frequency bands, three types of result information are finally classified, namely: confidence result information, angle result information, and frequency band...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More