

Wrist joint movement function evaluation and rehabilitation robot
A rehabilitation robot and motion function technology, applied in passive exercise equipment, sensors, diagnostic recording/measurement, etc., can solve problems such as insufficient rehabilitation training mode, difficult patient evaluation, and imperfect measurement methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028]This embodiment is a wrist joint motion function evaluation and rehabilitation robot.
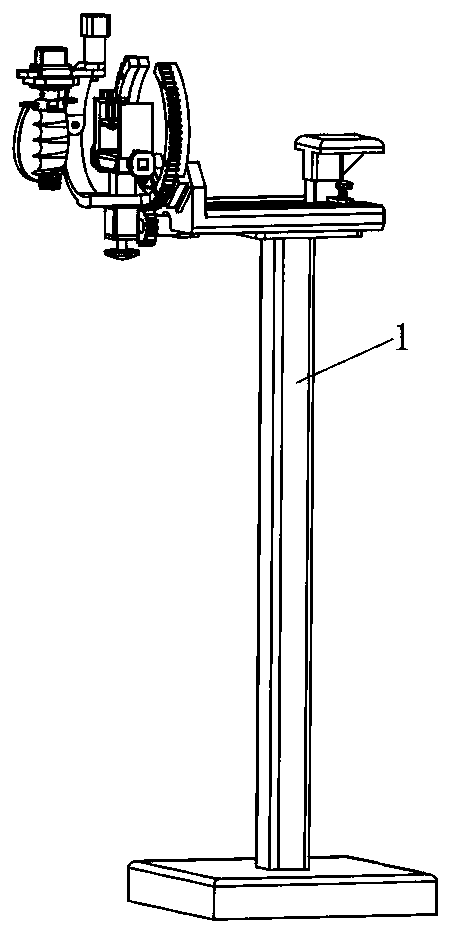
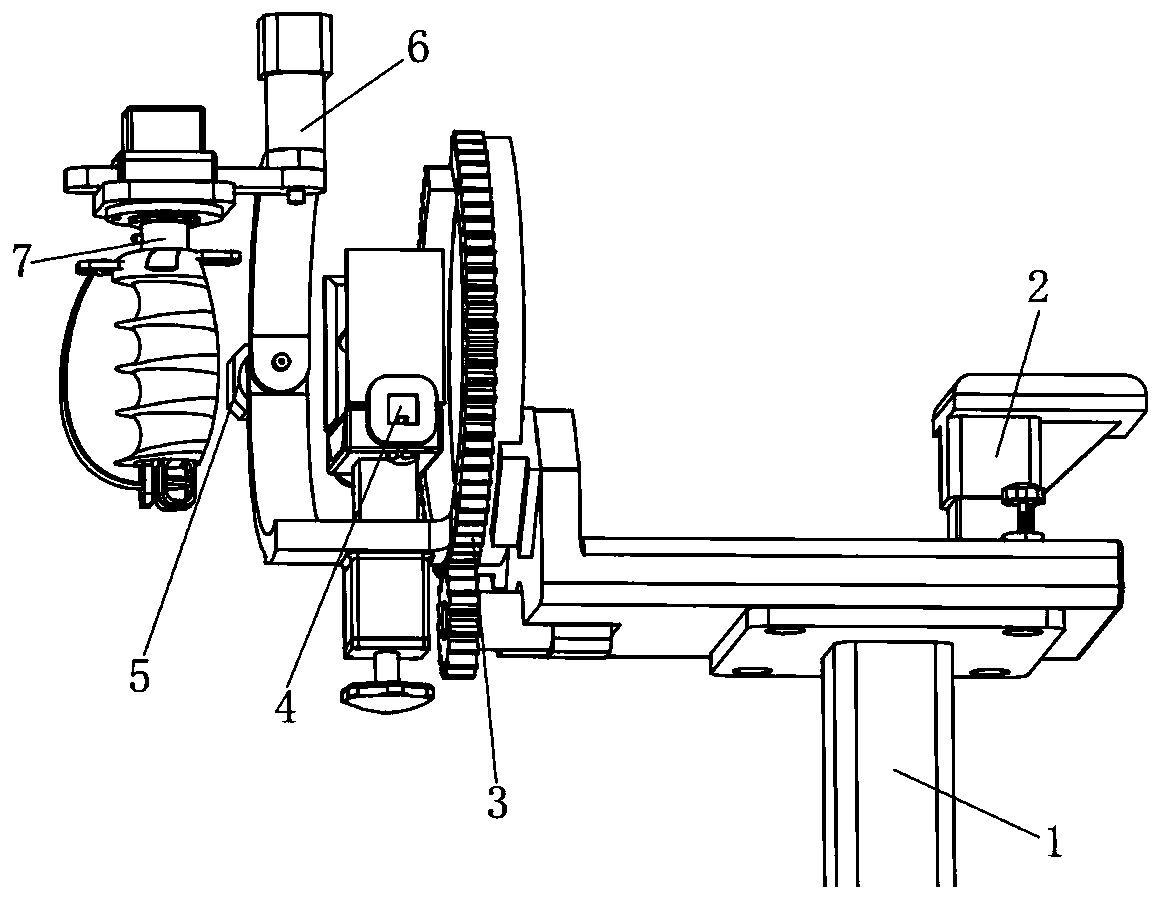
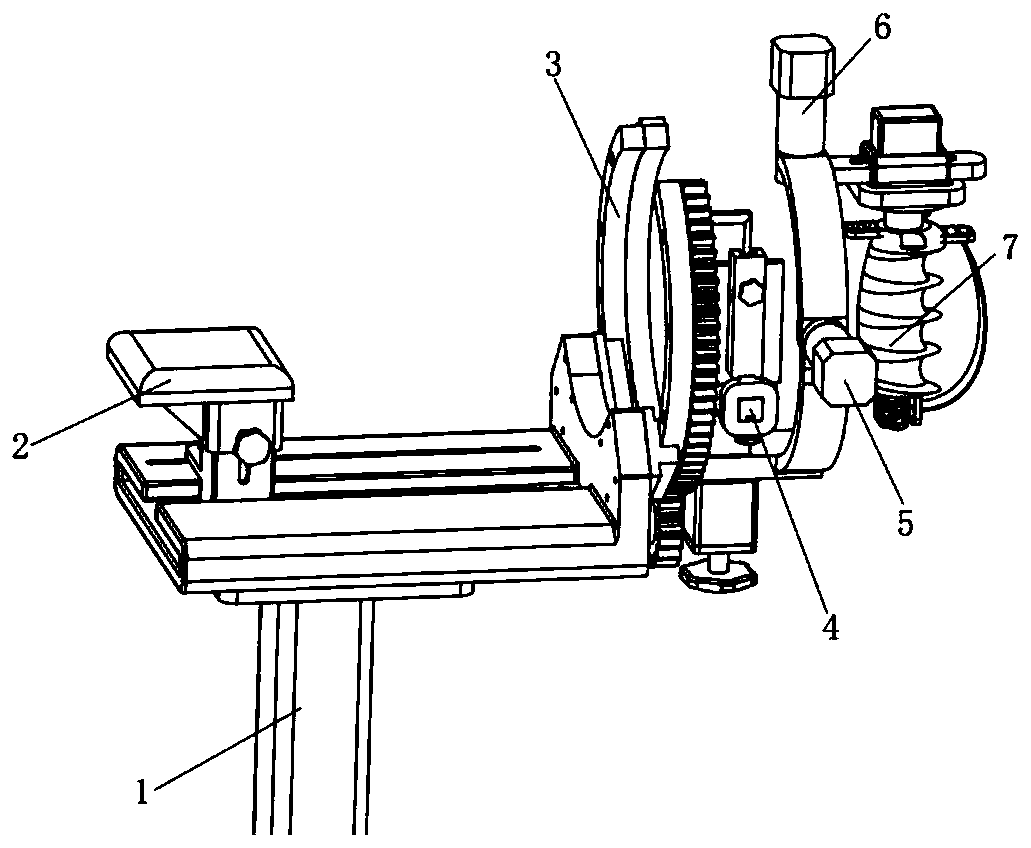
[0029] refer to Figure 1 to Figure 8 , the wrist joint motion function evaluation and rehabilitation robot in this embodiment consists of a bracket 1, an elbow position adjustment mechanism 2, a wrist joint rotation mechanism 3, a wrist joint rotation axis adjustment mechanism 4, an ulnar-radial deviation drive mechanism 5, and palm dorsiflexion The driving mechanism 6 and the terminal grasping mechanism 7 are composed; among them, the elbow position adjustment mechanism is fixedly connected with the bracket and provides support for each mechanism component, the wrist joint rotation mechanism 3, the wrist joint rotation axis adjustment mechanism 4, and the ulnar-radial deviation drive The mechanism 5, the palm dorsiflexion driving mechanism 6 and the terminal grasping mechanism 7 are respectively connected to the ends of the elbow position adjusting mechanism. Wherein, the elbow pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More