

Multi-unmanned aerial vehicle formation Standoff tracking control and tracking method based on double-virtual structure
A virtual structure and multi-UAV technology, applied in the field of UAV target tracking, can solve problems such as prolonging time and complicating algorithm design, and achieve the effect of simplifying difficulty, increasing actual engineering value, and simplifying complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0108] In this embodiment, four UAVs are used to track a maneuvering target as an example for verification.
[0109] The initial parameters of the four UAVs are shown in Table 1:
[0110] Table 1 Initial conditions of each unmanned simulation
[0111]
[0112]
[0113] UAV l The initial velocity v l is (20,0) T m / s; UAV b The relevant parameters are set to r s =50m, θ b = 0, ω 0 =(20 / r s )rad / s; control coefficient k 1 = 3,k 2 =2. The acceleration of the target in 0~12s is [5sin t, 5cos t] T m / s 2 , after 12s the acceleration is [4cos t,4sin t] T m / s 2 . The communication topology relationship between UAVs is as follows: Figure 5 shown, namely
[0114]
[0115] Simulation results such as Figure 6 to Figure 10 shown.
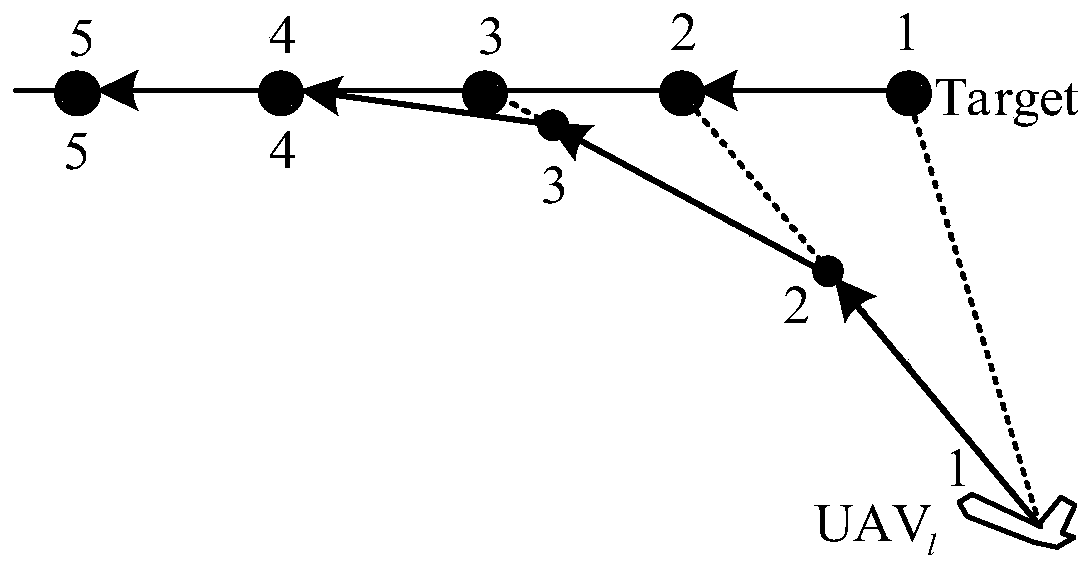
[0116] Image 6 Trajectory diagram for Standoff tracking of a maneuvering target by a multi-UAV formation, 4 UAVs start from their respective initial positions, and the UAV l The target is tracked under the guidance of the target, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More