

Vehicle detection method based on monocular vision and laser radar fusion
A laser radar and vehicle detection technology, applied in character and pattern recognition, instruments, computer components, etc., can solve the problems of vehicle position and laser radar missed detection, eliminate overlapping detection results, suppress sample imbalance, and reduce the effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
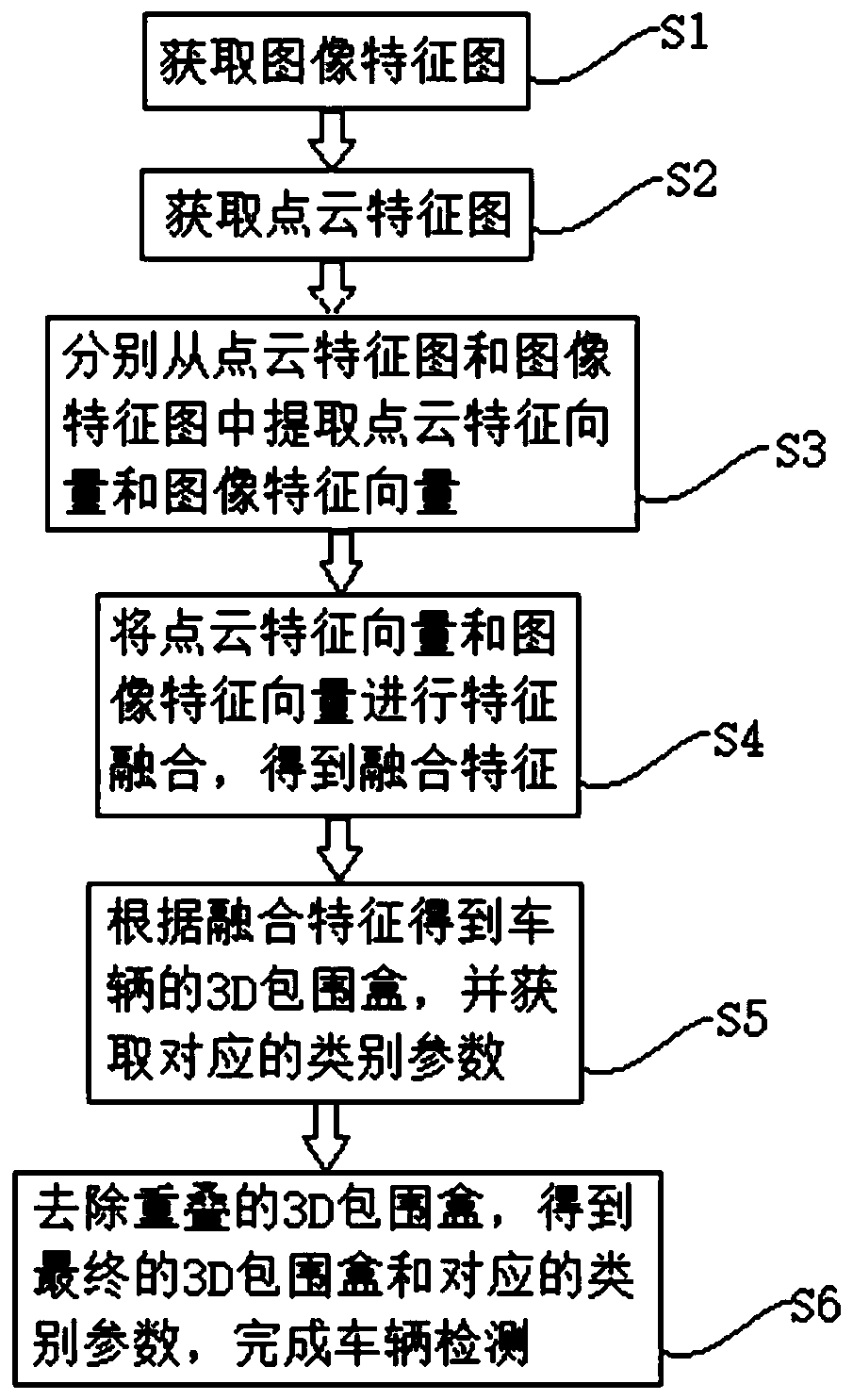
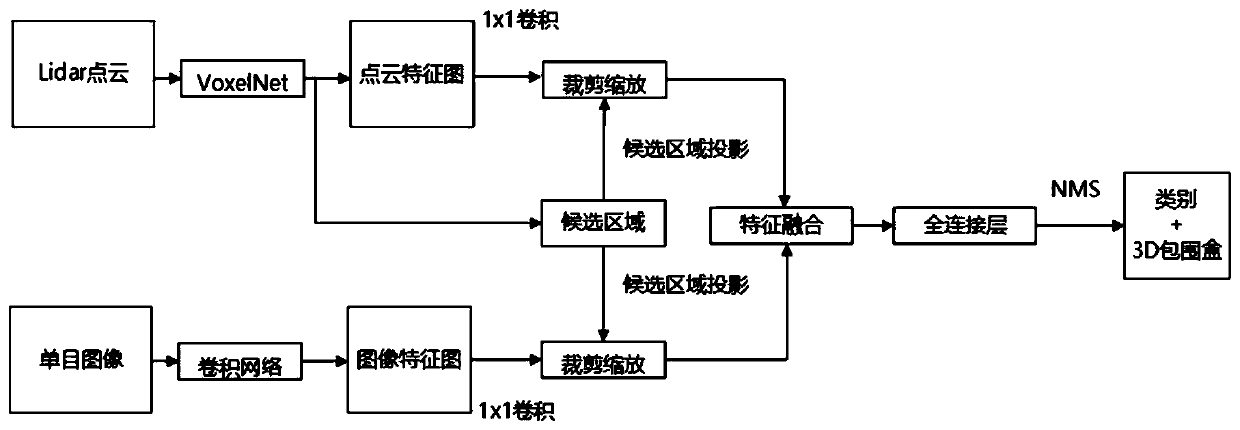
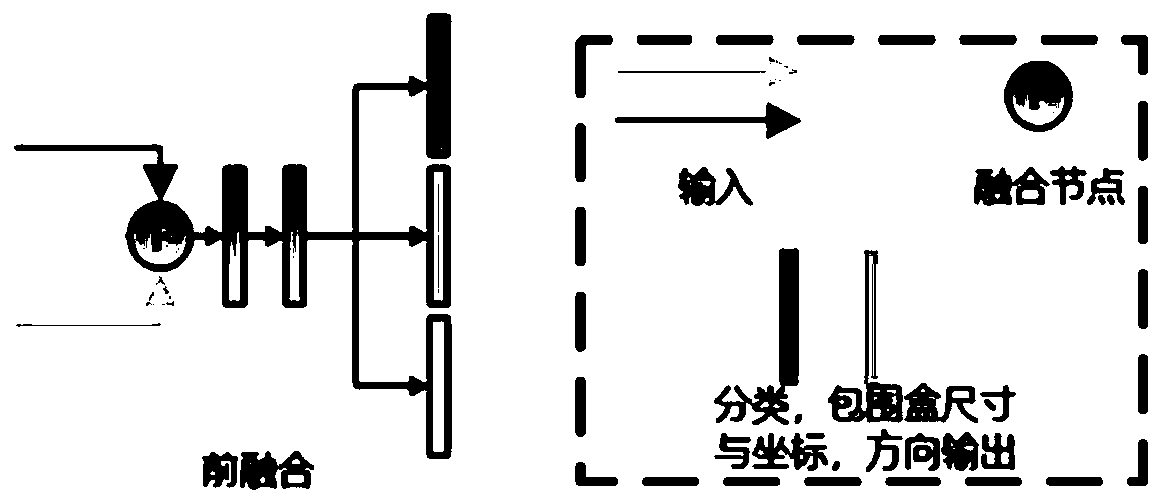
[0049] A vehicle detection method based on monocular vision and lidar fusion, including: using a feature pyramid network to extract image feature maps; using a VoxelNet network to obtain point cloud feature maps and extract 3D candidate regions; extract point clouds of regions of interest based on candidate regions Features and image features; use the pre-fusion strategy to fuse image features and point cloud features to obtain fusion features; use fusion features to estimate target categories and 3D bounding boxes; use non-maximum value suppression method to remove overlapping redundant bounding boxes and other steps, the overall process Such as figure 2 shown, including:
[0050] Step 1: Normalize the input image. First, calculate the mean value of the training set image on the R / G / B three channels. During training and detection, it is necessary to put the image on the R / G / B three channels The pixel values of the mean are subtracted respectively;
[0051] Step 2: For th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More