

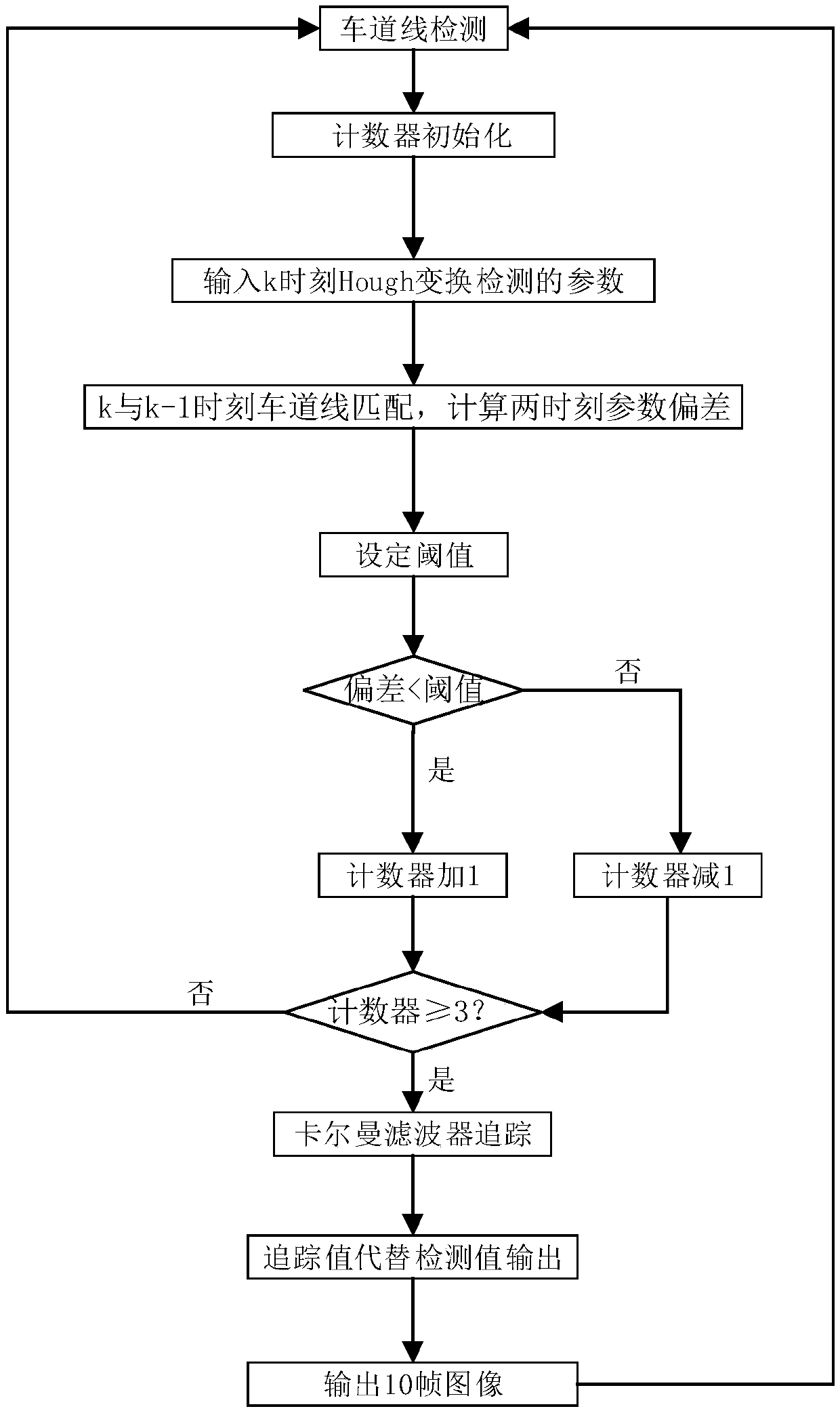
A lane line tracking method based on a Kalman filter
A Kalman filter and Kalman filter technology, applied in the field of vehicle engineering, can solve problems such as rare lane line features, inaccurate detection results, and detection failures, so as to improve driving safety, accurate detection results, and increase stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
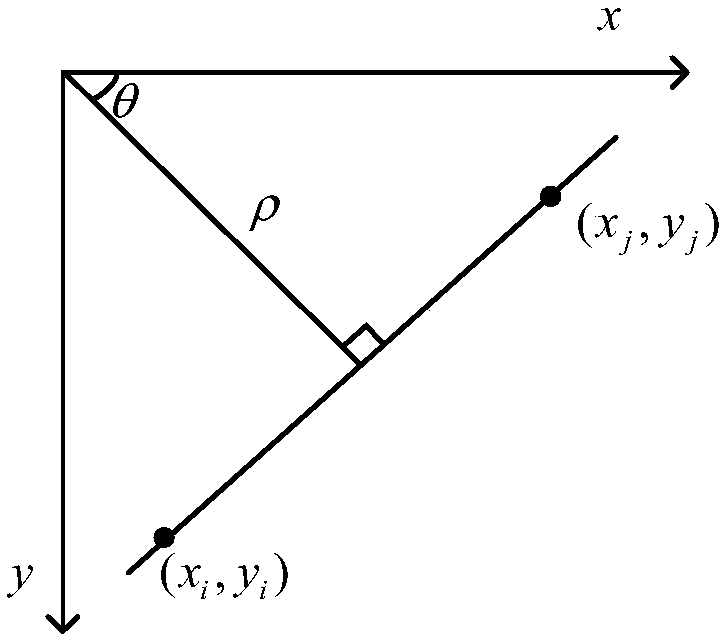
[0040] The lane line tracking method based on the Kalman filter provided by the present invention uses the state vector X in the lane line tracking process k Indicates the state of the lane line detected in each frame of the image, X k =[ρ k ,θ k ] T .
[0041] Lane update equation:
[0042] x k =AX k-1 +W k (1)
[0043] Observation equation:
[0044] Z k =HX k +V k (2)
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More