

Pigeon-flock-imitating intelligent vehicle formation cooperative adaptive cruise control switching method
A technology of adaptive cruise and intelligent vehicles, applied in two-dimensional position/channel control, vehicle position/route/height control, control/adjustment system, etc., can solve the problem of high difficulty in cluster formation control and lack of mature and perfect team coordination Adaptive control strategies and other issues to achieve the effect of broadening applications, improving road congestion and road safety issues, and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing.
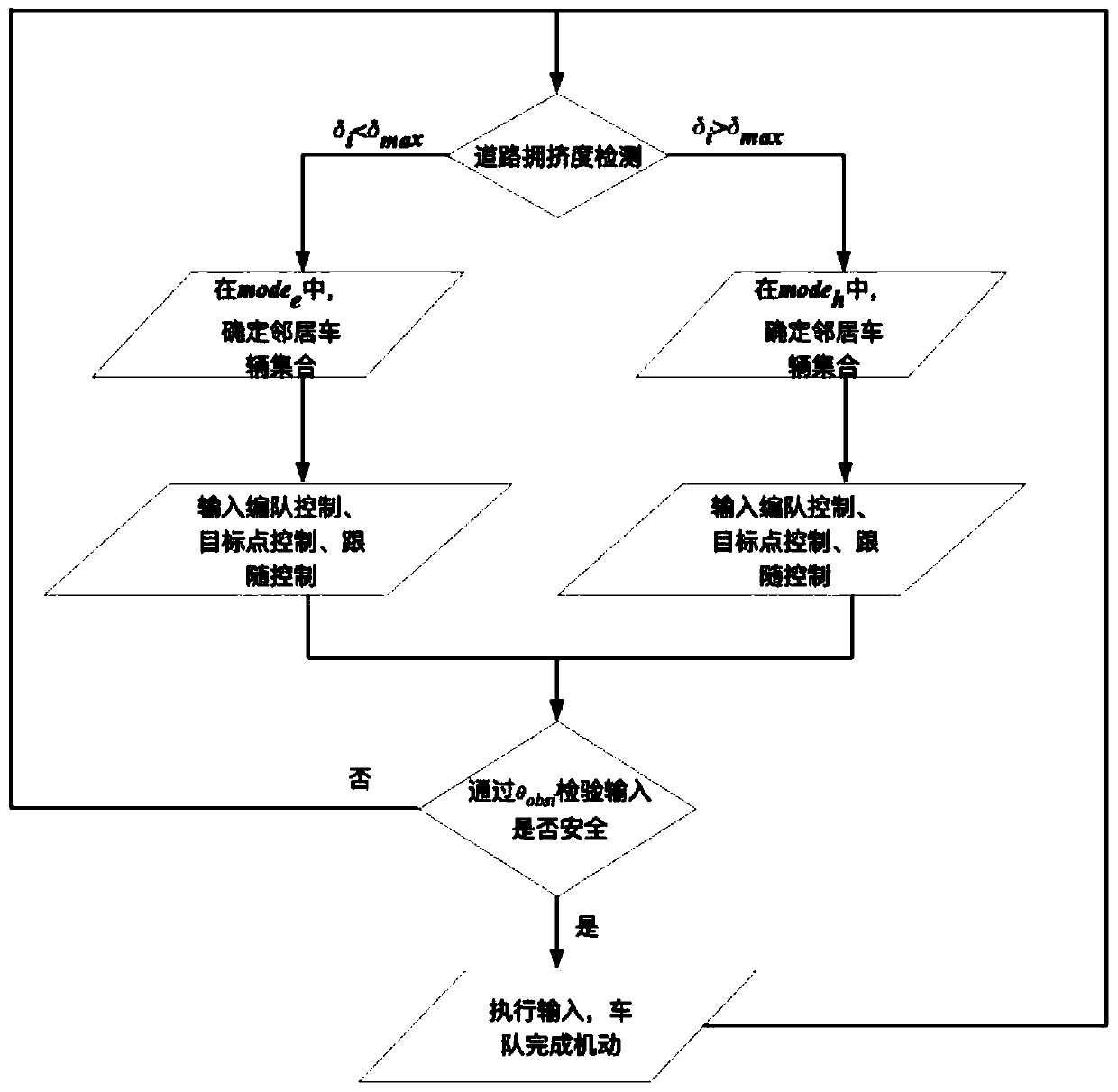
[0015] Such as figure 1 Shown, implementation of the present invention comprises the following steps:
[0016] Step 1 Judgment of road congestion
[0017] When the vehicle formation is driving in a certain road area, each individual vehicle will automatically calculate its perceivable area R vision inner road congestion. If the congestion degree calculated by all individual vehicles is less than the congestion degree threshold δ max , the group enters the hierarchical control mode mode h ; Otherwise, enter the equal interaction mode mode e . Considering that there are N vehicles in the vehicle formation, the dynamic model of each individual vehicle i is
[0018]
[0019] where x i , v i , P i are the position vector, velocity vector and control input of individual vehicle i, respectively, m i is the mass of individual vehicle i. in R vision Inside, the conge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More