

A remote takeover method for unmanned vehicles based on scene familiarity
A familiar, unmanned vehicle technology, applied in the field of information processing, can solve problems such as cost increase, insecurity, and reduced practicality of unmanned vehicles, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
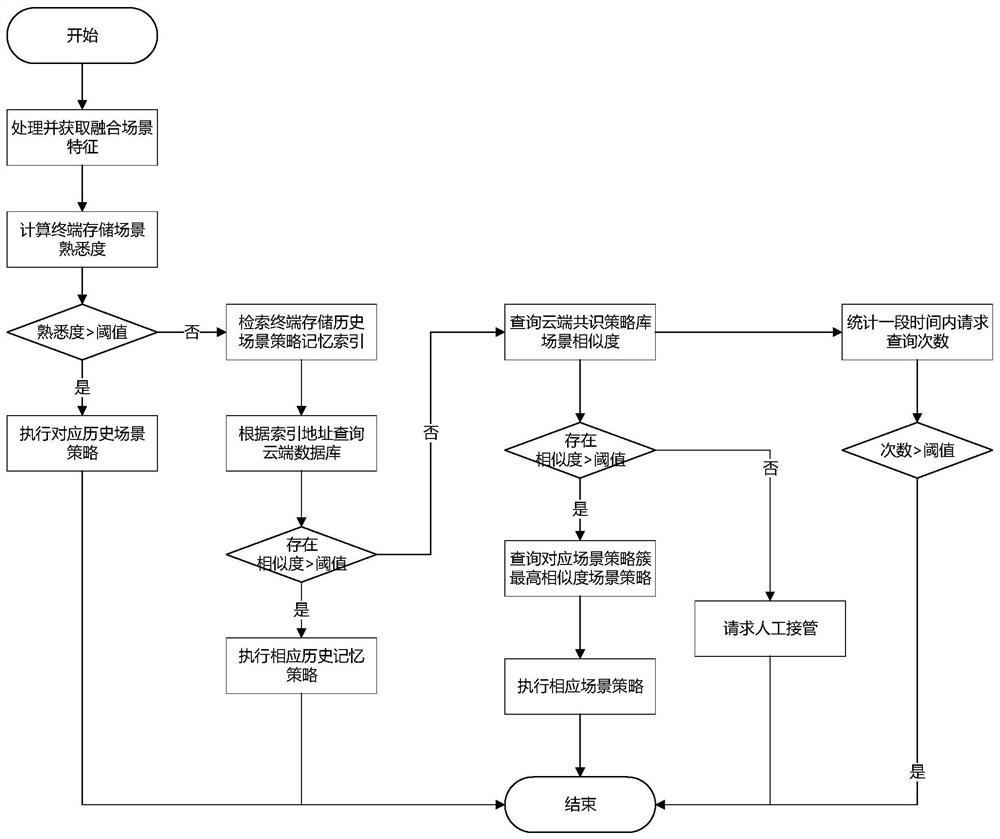
[0027] The present invention provides a remote takeover method for unmanned vehicles based on scene familiarity, such as figure 1 shown, including the following steps:
[0028] (1) When the unmanned vehicle faces a new scene, it processes the data of multiple sensors deployed on the unmanned vehicle to generate corresponding fusion scene feature information;
[0029] The method for fusing scene feature information includes any one of Bayesian inference method, Kalman filter method, cluster analysis method, fuzzy set method or neural network method. Adopt Bayesian reasoning method among the present invention, specifically as follows:
[0030] Based on the environmental information perceived by the sensors deployed by the unmanned vehicle, regularize it and extract feature par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More