

Robot assembling section for box body and cross beam of disinfection cabinet production line
A production line and robot technology, applied in metal processing, manufacturing tools, metal processing equipment, etc., can solve the problems of low production efficiency and low degree of automation of manual screwing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
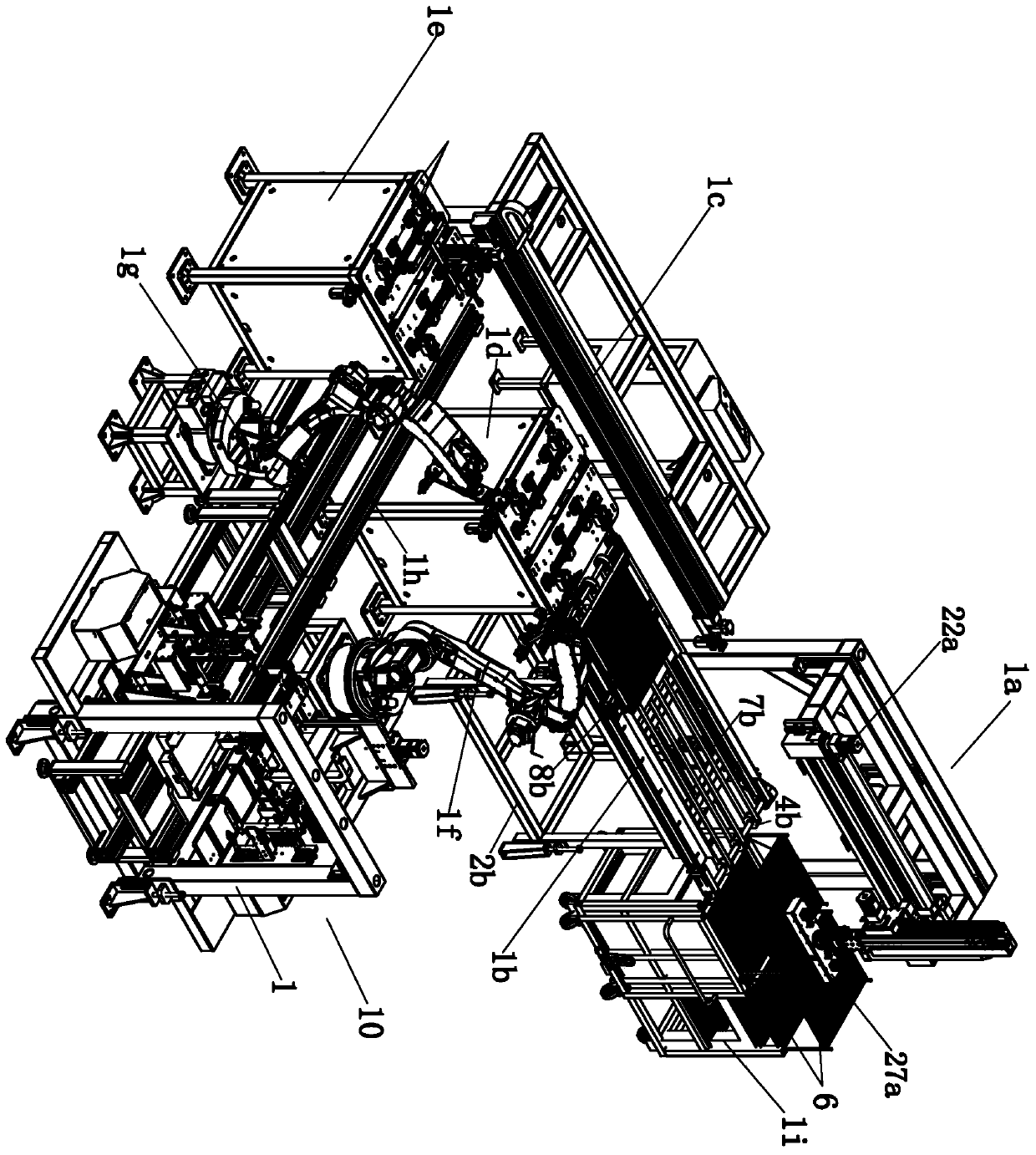
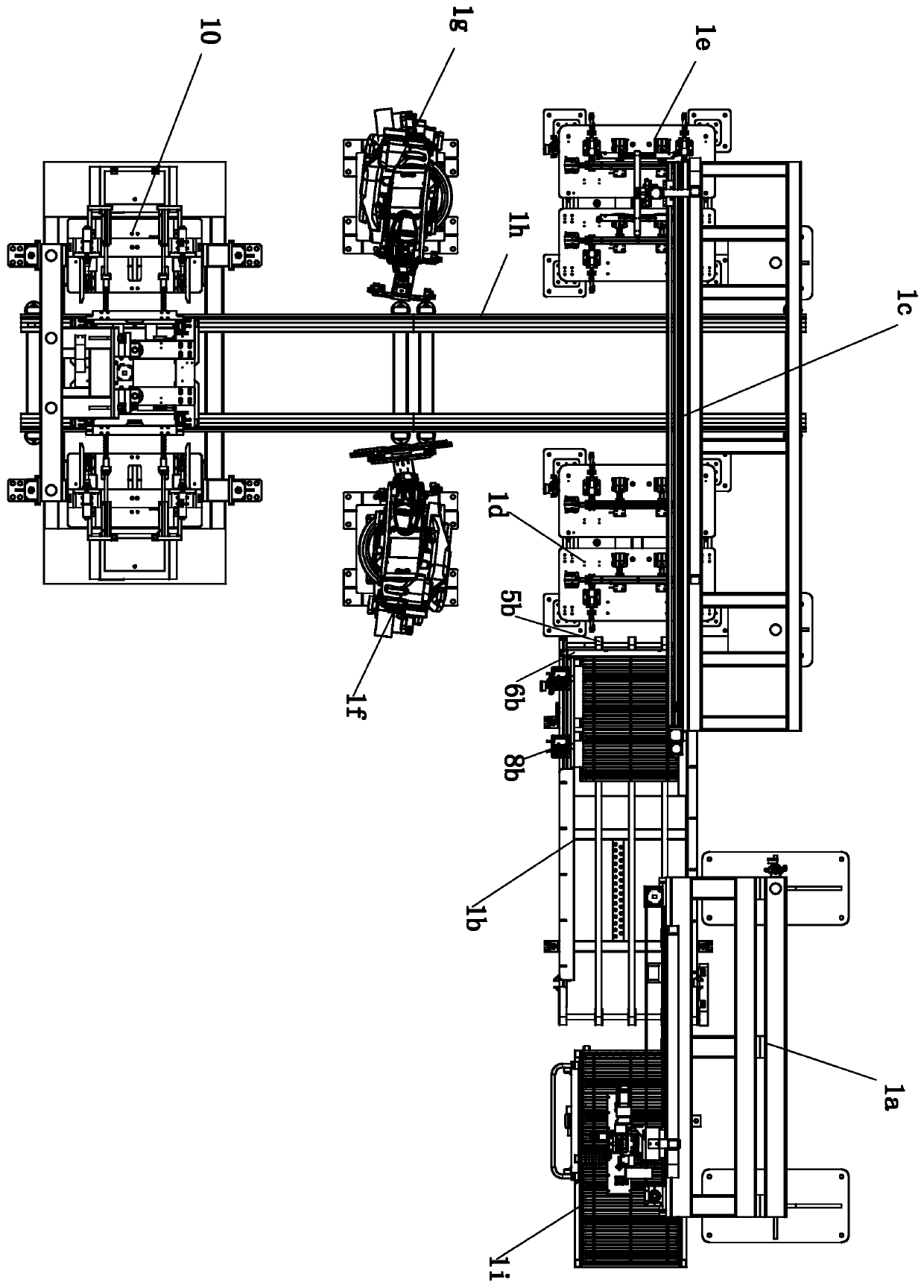
[0055] Embodiment one, such as Figure 1 to Figure 17 As shown, a robot assembly section of the box body and the beam of a disinfection cabinet production line includes a beam tooling vehicle 1i, a feeding manipulator 1a, a positioning conveyor line 1b, two secondary positioning platforms 1d, 1e, a feeding manipulator 1c, two Beam feeding robots 1g, 1f, box assembly line 1h and beam screwing machine 10.
[0056] The crossbeam tooling vehicle 1i is used for arranging and placing a plurality of crossbeams 6 .
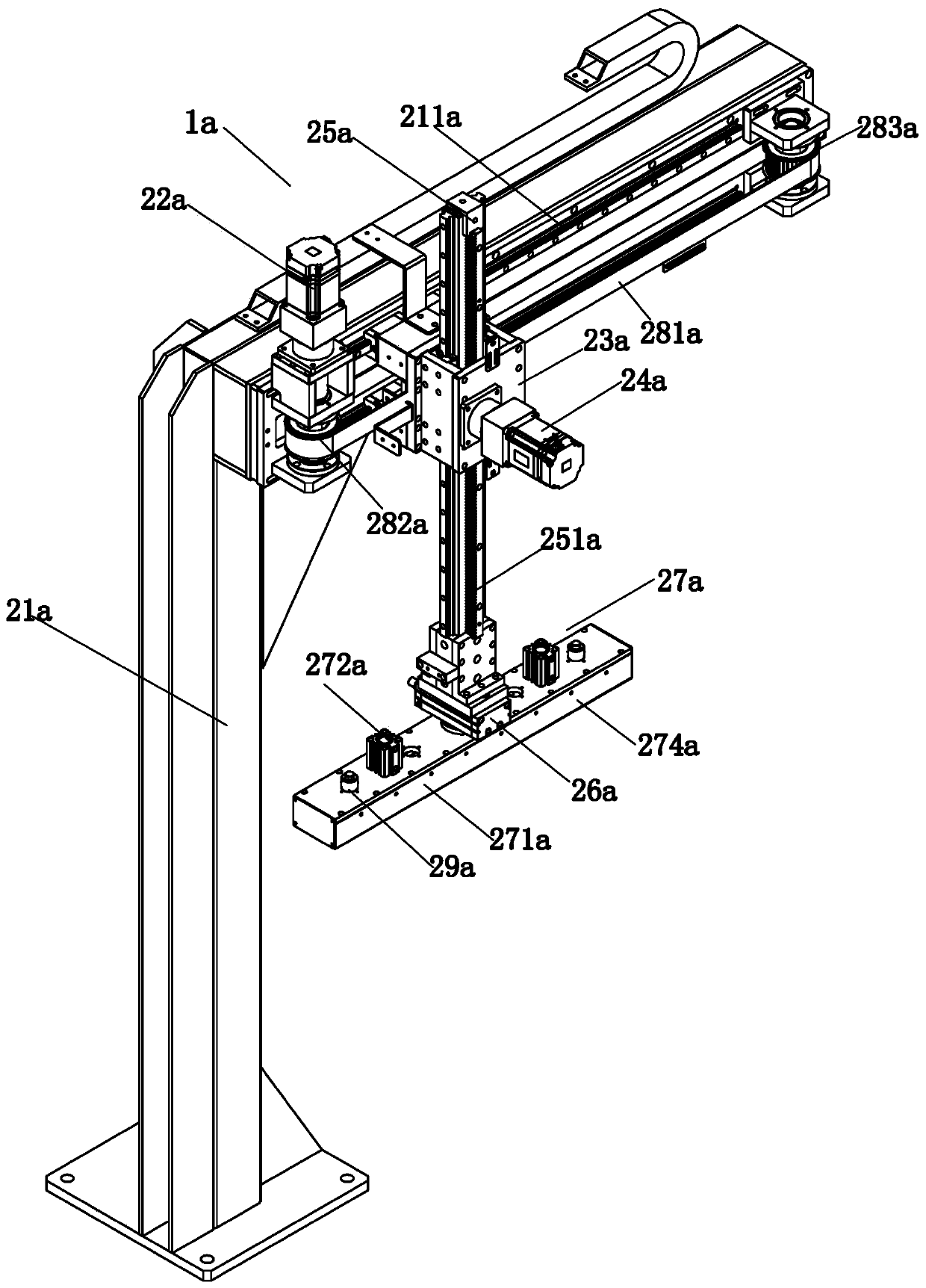
[0057] The feeding manipulator 1a is used to grab the arranged beams 6 on the beam tooling vehicle 1i onto the positioning conveying line 1b.
[0058] The positioning conveying line 1b is used to position the multiple rows of beams 6 grabbed by the feeding manipulator 1a.
[0059] The feeding manipulator 1c is used to grab the two beams 6 positioned on the positioning conveying line 1b to the secondary positioning platforms 1d and 1e.
[0060] The tops of the secondary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More