

Vehicle positioning and navigation method and device and related system
A vehicle positioning and vehicle technology, applied in the field of navigation, can solve problems such as inaccurate positioning, inaccurate vehicle guidance information, and wrong roads
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
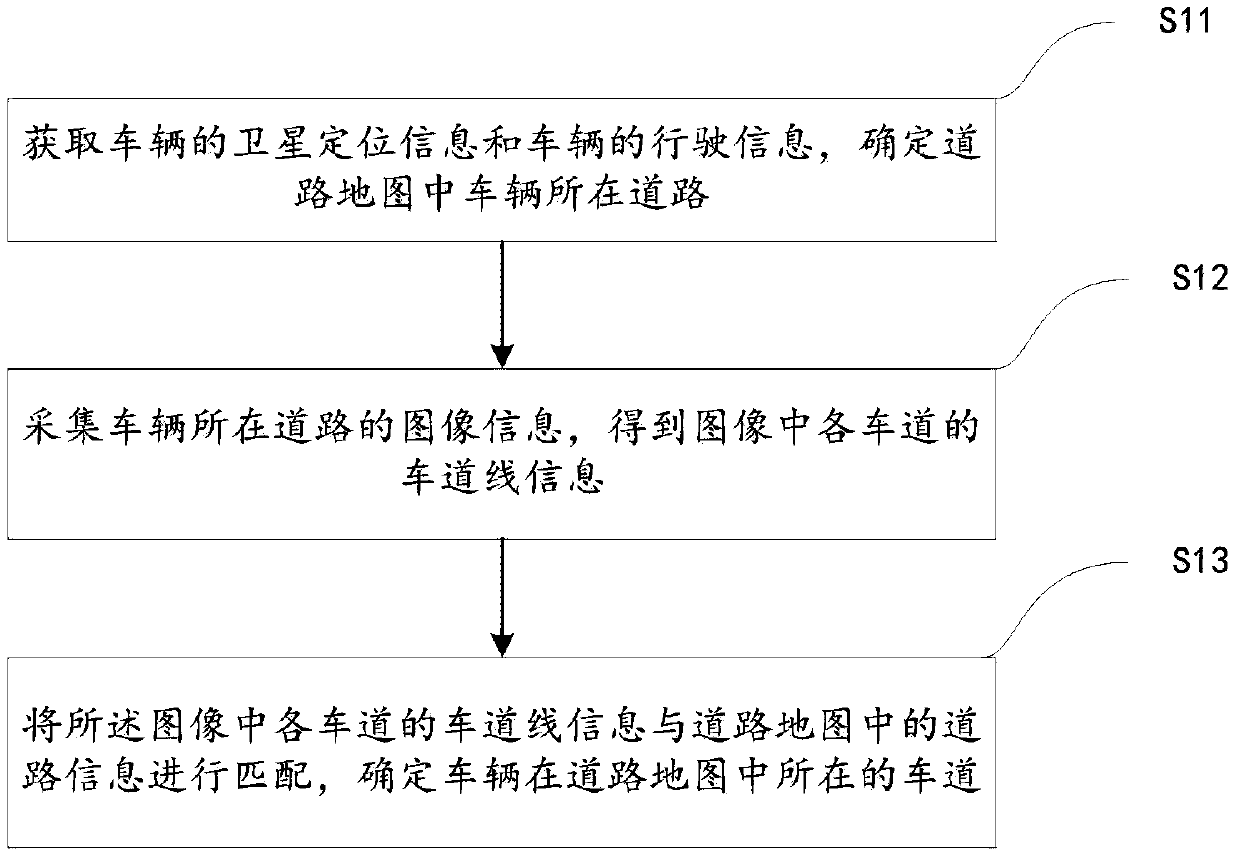
[0046] The embodiments of the present invention provide a vehicle positioning method for the above-mentioned problems in the prior art, such as figure 1 As shown, the method includes the following steps S11-S13:
[0047] S11: Obtain the satellite positioning information of the vehicle and the driving information of the vehicle, obtain the absolute position information of the vehicle, and determine the road where the vehicle is located in the road map according to the absolute position information of the vehicle.
[0048] The satellite positioning information of the vehicle can be obtained by using existing satellite positioning systems, such as the Global Positioning System (GPS), BeiDou Navigation Satellite System (BDS) or Global Navigation Satellite System (Global Navigation Satellite System). System, GLONASS); the driving information of the vehicle can include the speed information of the vehicle and the steering information of the vehicle. The speed information of the vehicle an...
example 1
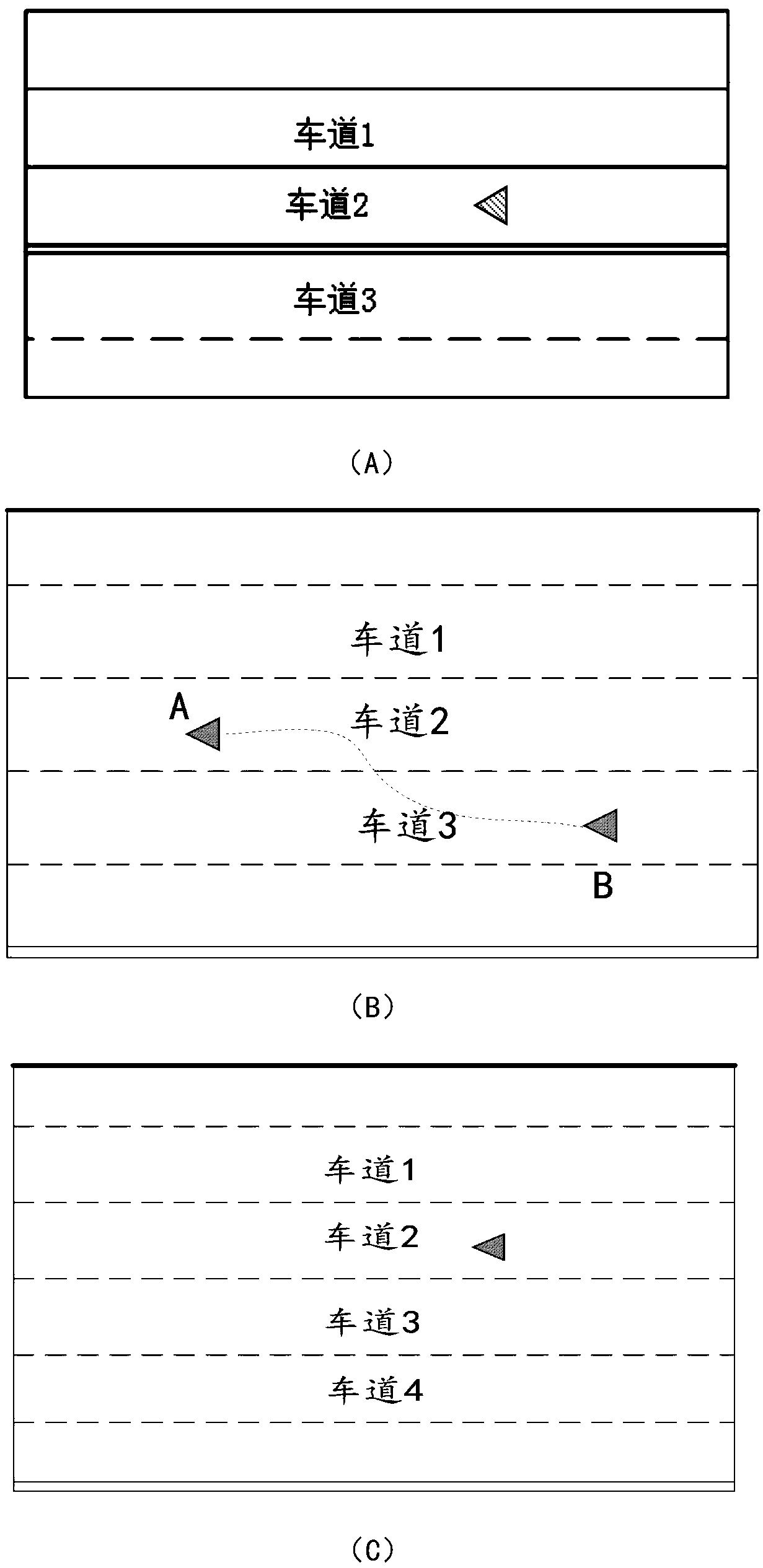
[0057] Example one, such as image 3 As shown in (A), during the driving process of the vehicle, according to the image information of the road where the vehicle is located at the current moment, it can be determined that there are two lanes on the left and right sides of the vehicle, that is, the road in the image includes lanes 1 to Lane 3 has 3 lanes, and the types of the 4 lanes from lane 1 to lane 3 are single solid line, single solid line, double solid line and single dashed line from left to right. Among them, the type of lane line in the image There is a special lane line in the vehicle (the triangle in the figure), that is, there is a double solid line on the left side of the lane where the vehicle is located. According to the number of lanes on the road where the vehicle is located in the road map, there are three lanes, that is, four lane lines, then the vehicle can be determined to be on the road map In the leftmost lane of the road.
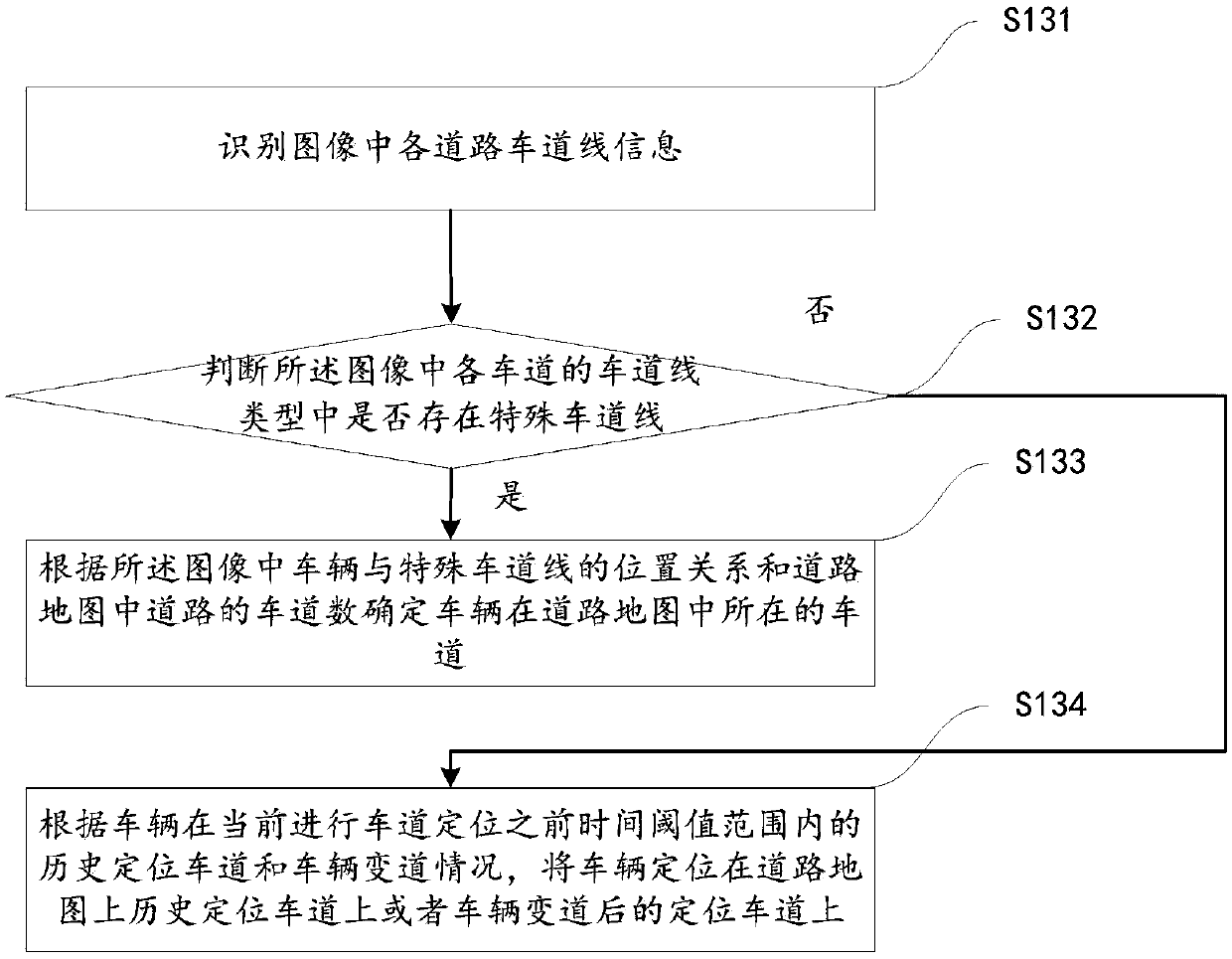
[0058] S134: According to the ve...
example 3
[0061] Example three, such as image 3 As shown in (C), during the driving process of the vehicle, according to the image information of the road where the vehicle is located at the current moment, it can be determined that there are two lanes on the left and right sides of the vehicle, that is, the road in the image includes 3 lanes , And the types of the 4 lanes are all single dashed lines, and there is no historical positioning lane within the time threshold T1 before the current lane positioning. According to the number of lanes on the road where the vehicle is located in the road map, the lane line The number is 7. According to the road attributes, it can be known that the rightmost lane line is the edge line of the road. It can be seen that there are 5 white dashed lines on the road. It is not clear whether the vehicle positioning position is on lane 2 or lane 3. According to the traffic rules, it is to keep to the right, and the vehicle is positioned on the designated roa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More