

High-altitude operation remote operation method and system based on stereo vision and gesture control
A high-altitude operation and stereo vision technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems that it is difficult for operators to accurately judge the three-dimensional relationship between high-altitude components, interactive equipment is difficult to use, and lack of three-dimensional information, etc. Remote operation interactive experience, getting rid of the limitations of the environment and line of sight, and a strong sense of interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In the description of the present invention, it should be noted that unless otherwise specified and limited, the terms "installation", "connection" and "connection" should be understood in a broad sense, for example, it can be a fixed connection or a detachable connection. Connected, or integrally connected; it may be mechanically connected or electrically connected; it may be directly connected or indirectly connected through an intermediary, and it may be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention in specific situations.
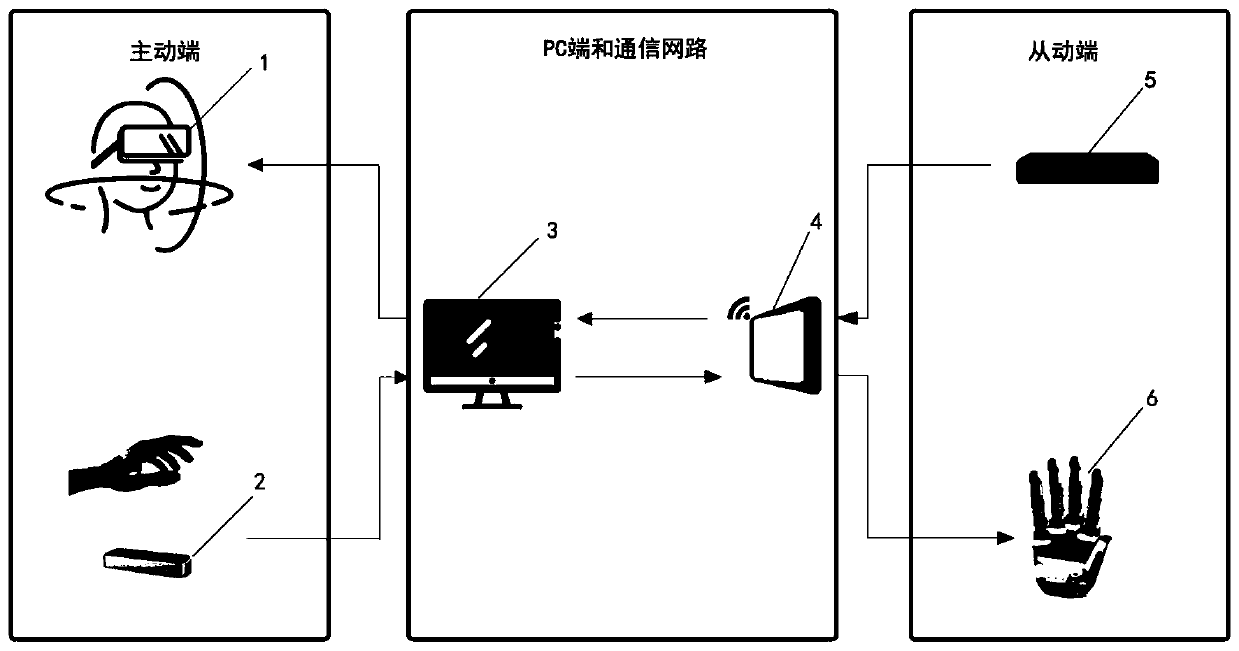
[0042] see figure 1 , the present invention provides a teleoperation system for high-altitude operations based on stereo vision and gesture control, including an active operating terminal, an operating slave end, a PC terminal 3 and a communication network device 4, and each component of the active operating terminal communicates wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More