

Monocular vision road target detection and distance estimation method based on improved YOLOv3
A technology of target detection and distance estimation, applied in the field of image processing and computer vision, can solve the problems of single detection effect, inability to obtain sufficient information, inability to balance the accuracy rate of road targets and real-time performance, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
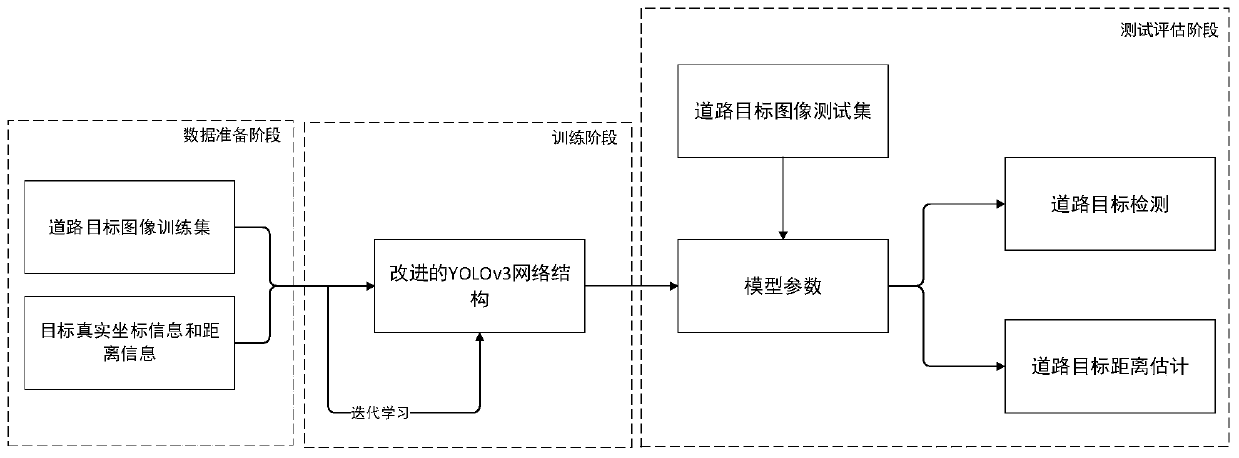
[0046] combine figure 1 , the specific implementation is as follows:
[0047] Step 1: Obtain a road object image dataset containing road object bounding boxes, category information and distance information, divide the data set into a training set and a verification set, and perform certain data preprocessing.
[0048] This step includes: making the label information such as the target bounding box, category and distance of the road target graphic dataset into Pascal VOC or MS COCO dataset format, and then dividing the road target image dataset into a training set and a verification set according to a certain ratio. In this embodiment, the road object image dataset focuses on three types of road objects (i.e., vehicles, cyclists, and pedestrians), and the road object image dataset is divided into a training dataset and a verification dataset according to a ratio of 9:1. .
[0049] Step 2: Build an improved YOLOv3 network structure based on the Global-Context structure and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More