Method for acquiring coordinate transformation matrix and positioning target in monitoring picture
A coordinate conversion matrix and acquisition method technology, applied in the field of intelligent video surveillance, can solve the problems of heavy calibration workload, complex prediction, inconvenient, etc., achieve real-time positioning and tracking and augmented reality functions, reduce difficulty, and facilitate command and dispatch Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
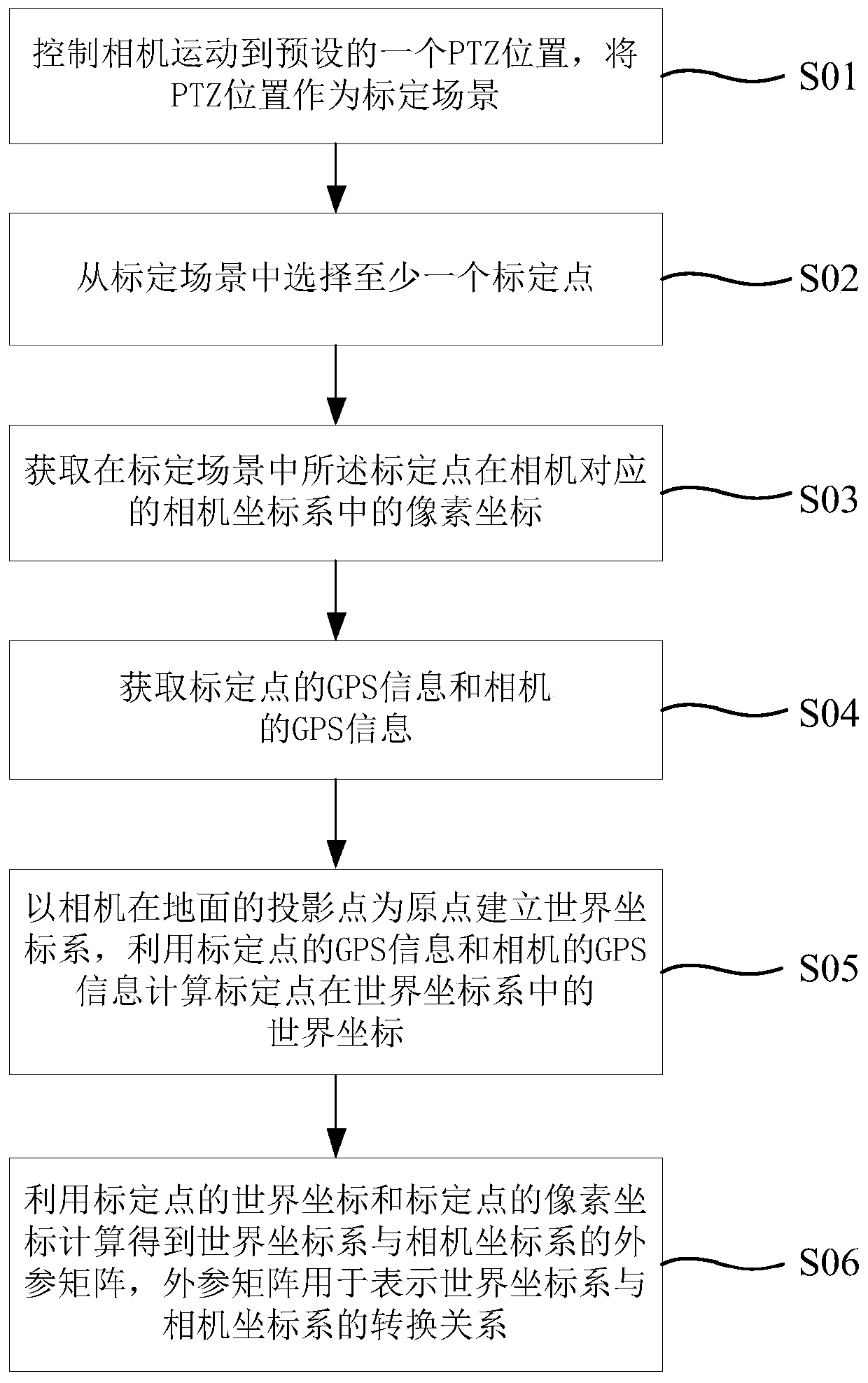
[0036] An embodiment of the present invention provides a method for obtaining a coordinate transformation matrix, such as figure 1 shown, including the following steps:
[0037] Step S01: Control the camera to move to a preset PTZ position, and use the PTZ position as a calibration scene.
[0038] In practical applications, the world where the camera lives is three-dimensional, while the photo is two-dimensional, and the function from three-dimensional to two-dimensional process is irreversible, so camera calibration is required, and the goal of camera calibration is to find a suitable mathematical Model, find the parameters of this model, so that the process from three-dimensional to two-dimensional can be approximated, and the function of this three-dimensional to two-dimensional process can find the inverse function. In the embodiment of the present invention, the camera is first controlled to move to a preset PTZ position, and the preset PTZ position is determined as the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More