

Method for determining underwater three-dimensional acoustic three-dimensional array of wave glider
A determination method and a three-dimensional array technology, applied to vibration measurement in fluids, measuring vibrations, measuring devices, etc., can solve the problems of fixed observation sites, large consumption of manpower/material resources, and large volume, so as to reduce labor costs and improve efficiency , small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0020] Specific implementation mode 1: In this implementation mode, a method for determining an underwater three-dimensional acoustic stereo array of a wave glider is as follows:
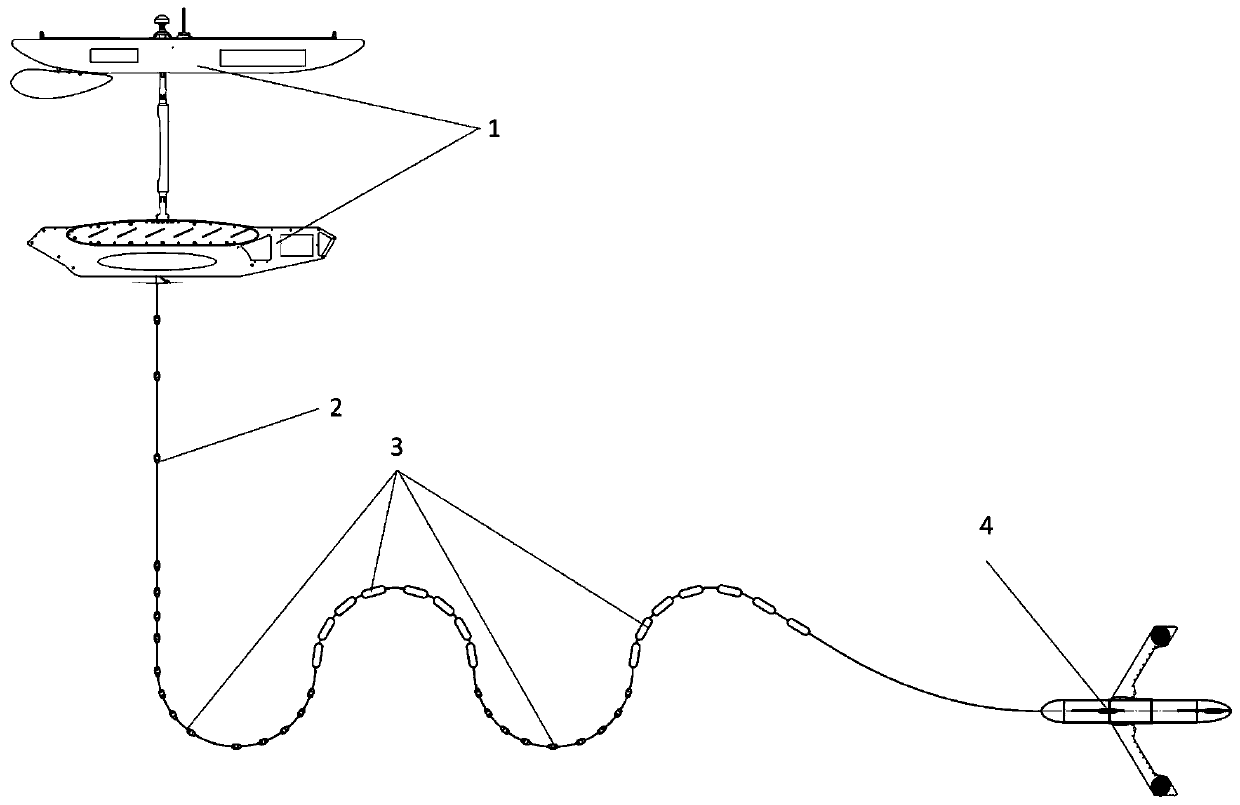
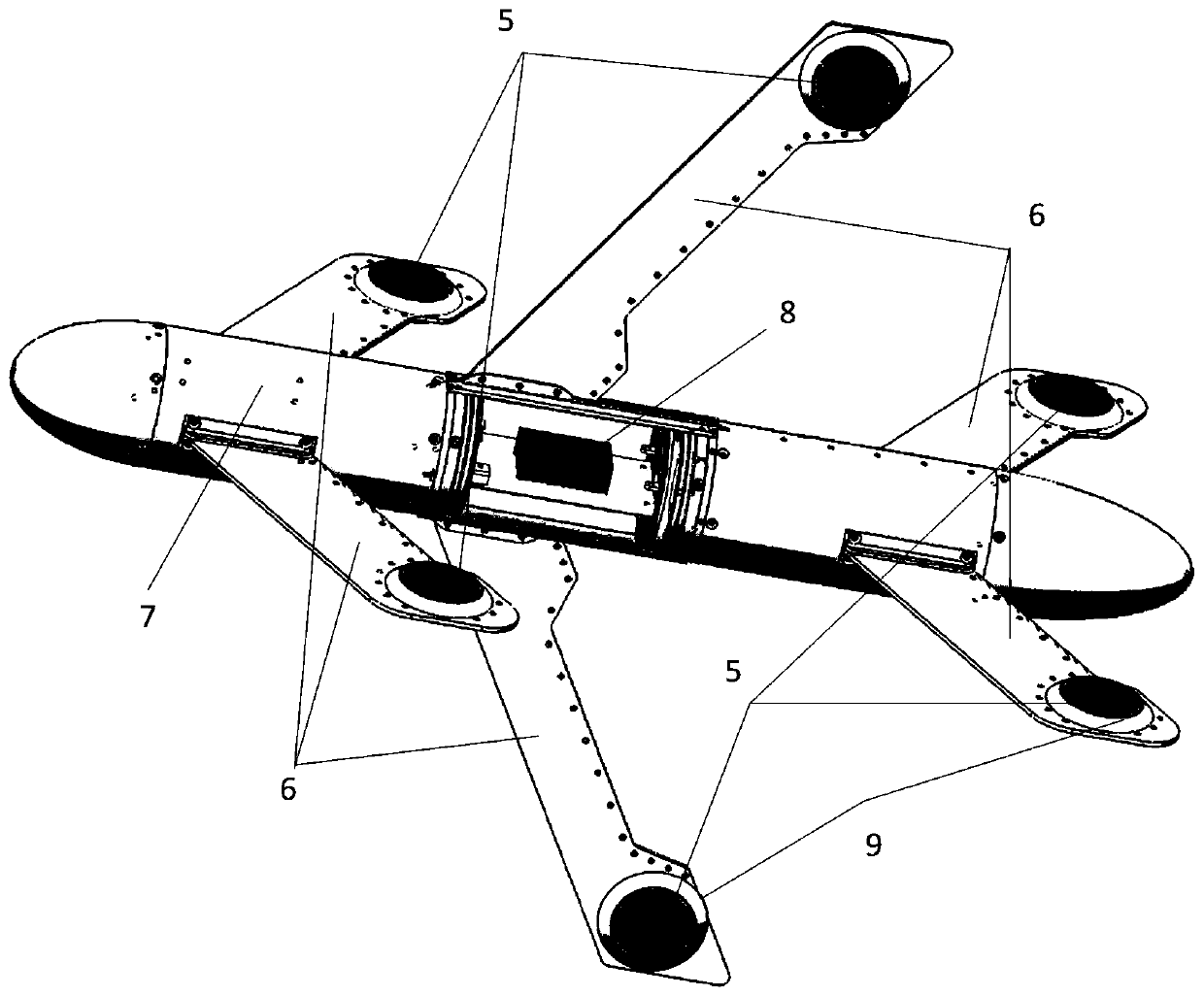
[0021] The underwater three-dimensional acoustic stereo array is composed of hydrophone stereo array, underwater drag body, wing plate and attitude sensor;
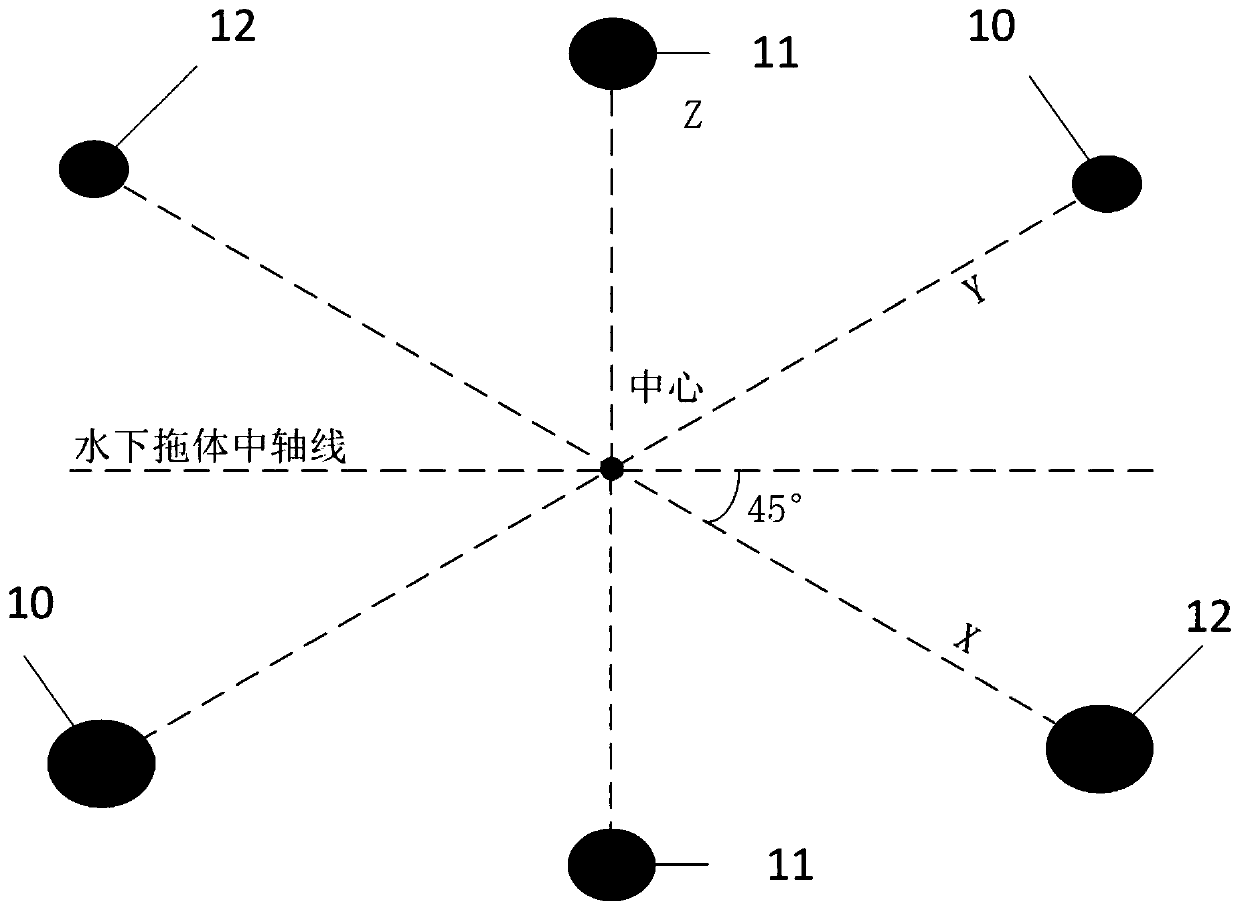
[0022] The three-dimensional array of hydrophones is composed of six hydrophones, and the six hydrophones are in groups of two, respectively installed in the X, Y, and Z directions of the underwater towing body, and the two hydrophones in the X direction Obtain X-dimension sound field information, two hydrophones in Y direction obtain Y-dimension sound field information, two hydrophones in Z direction obtain Z-dimension sound field information, X, Y, Z three directions are orthogonal, three sets of hydrophones Synchronously obtain X, Y, Z three-dimensional spatial information of the ocean sound field, that is, two hydrophones in each direction ...
specific Embodiment approach 2
[0027] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the two hydrophone connections on the X dimension and the two hydrophone connections on the Y dimension are respectively connected to the center of the underwater towing body. The axis is at an angle of 45°.
[0028] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0029] Embodiment 3: The difference between this embodiment and Embodiment 1 is that the two hydrophones in the X dimension are installed on the central axis of the underwater towing body, and the two hydrophones in the Y dimension are installed on the underwater towing body. On the vertical line of the central axis of the body, under the condition that the spatial distance between the two hydrophones in the X dimension and the two hydrophones in the Y dimension are equal, the width and length of the underwater three-dimensional acoustic stereo array are reduced to times.
[0030] Compared with the two hydrophones in the X dimension, which are installed on the central axis of the underwater tow body, there is no need to install hydrophones on the underwater tow body and reserve an unobstructed space for the hydrophone, which reduces the size of the underwater tow body At the same time, it also reduces the influence of the underwater towing body on the sensitivity, directivity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More