

Robot path optimization method and system based on improved particle swarm optimization
An improved particle swarm and path optimization technology, applied in control/adjustment systems, instruments, calculations, etc., can solve problems such as starting point or weight selection is easy to fall into local optimal solution, complex environment model does not perform well, and the number of iterations is too high , to achieve the effect of improving motion efficiency, reducing the risk of collision, and improving search accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
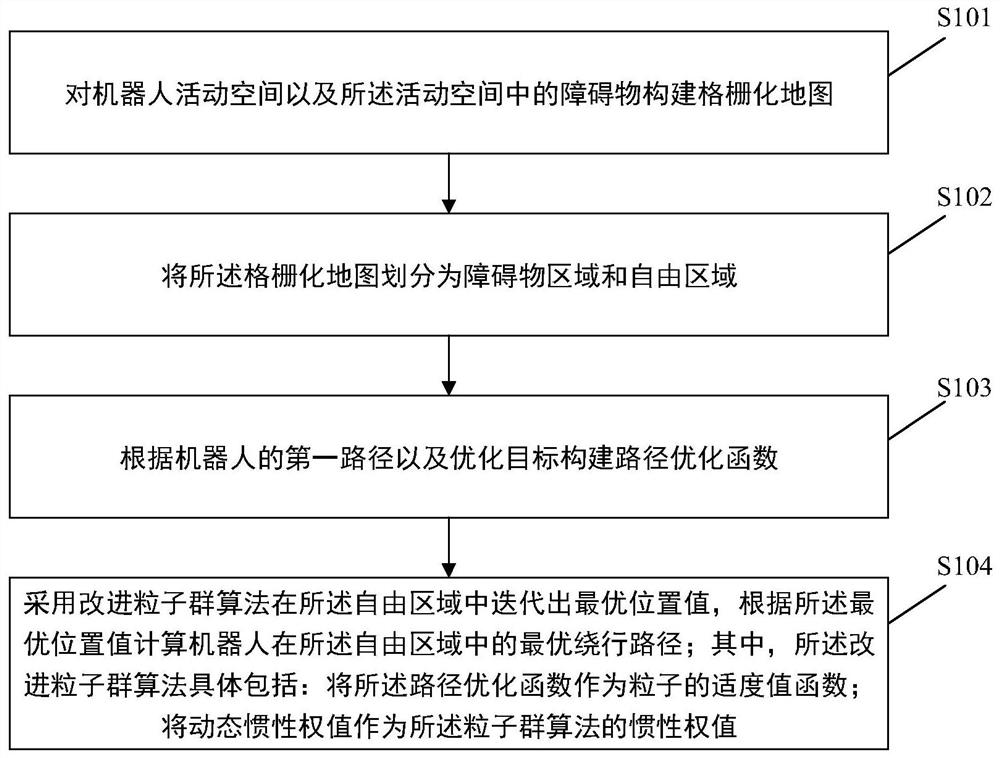
[0058] see figure 1 , is a schematic flowchart of a robot path optimization method based on an improved particle swarm algorithm provided in Embodiment 1 of the present invention, including the following steps:
[0059] S101, constructing a grid map for the robot activity space and obstacles in the activity space;
[0060] S102, dividing the gridded map into an obstacle area and a free area;
[0061] S103, constructing a path optimi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More