

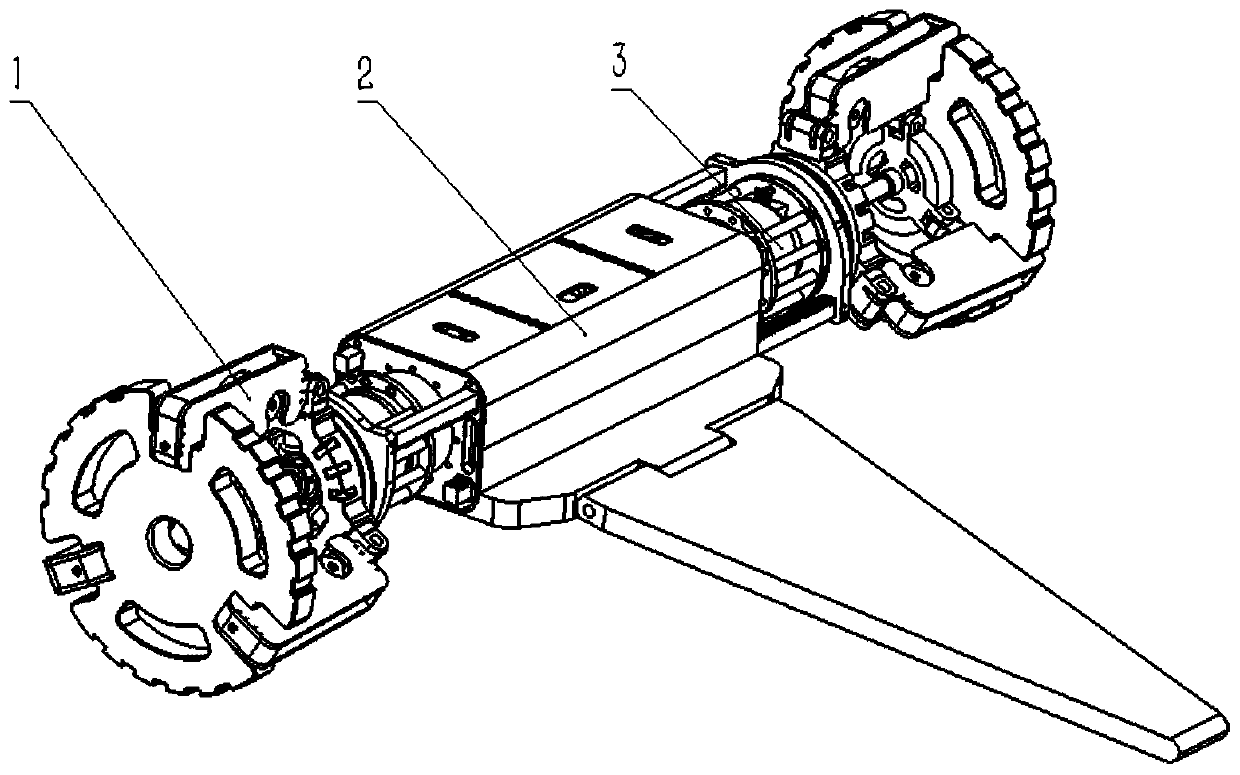
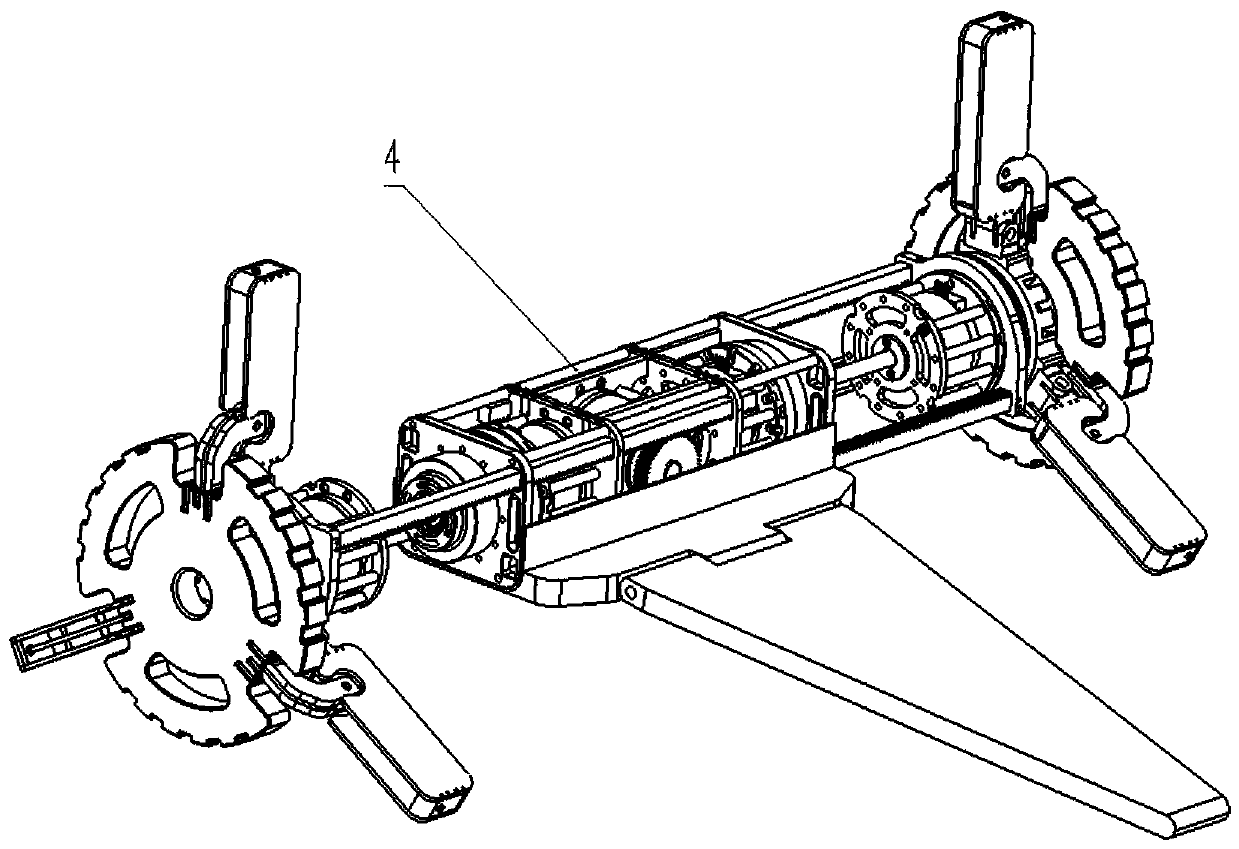
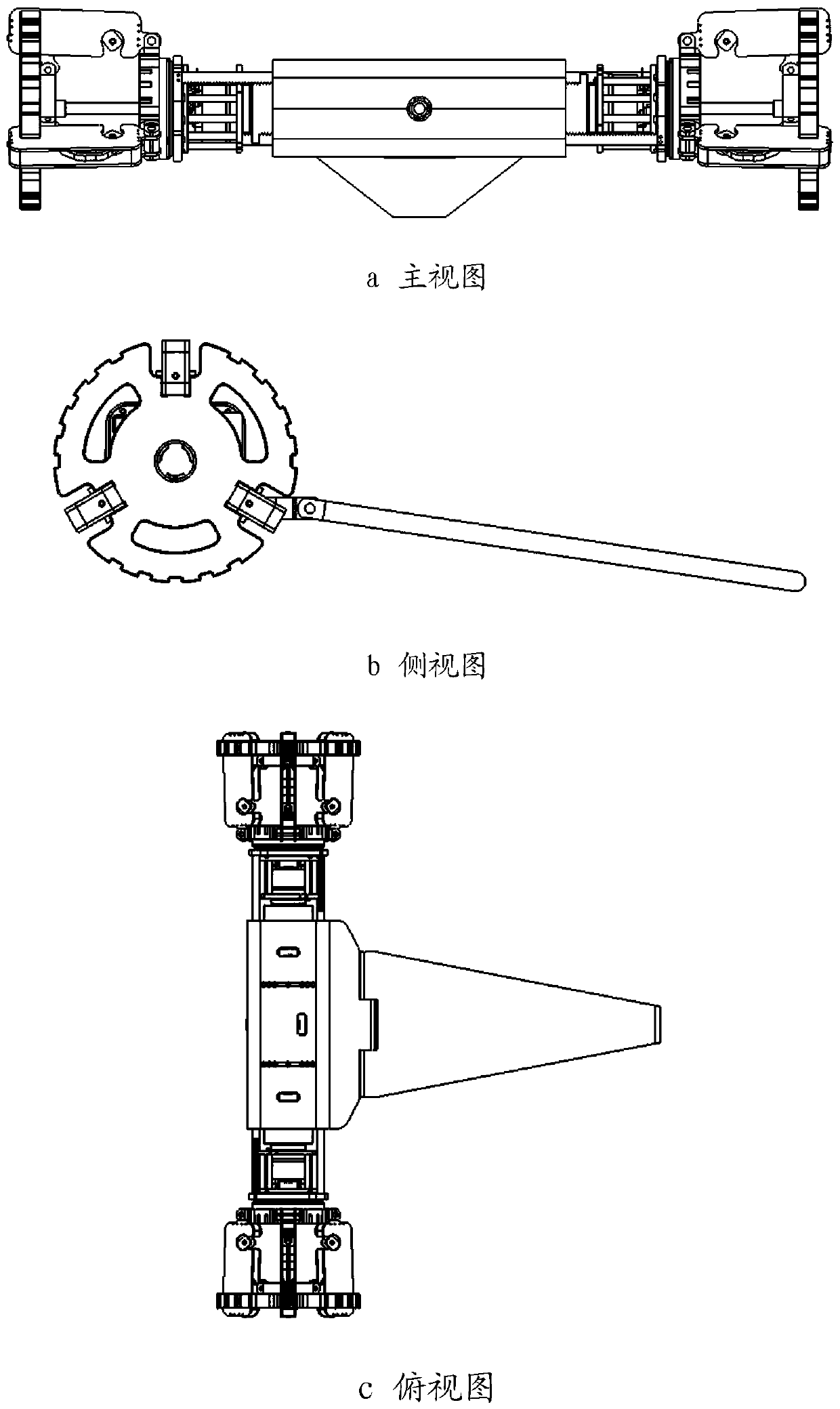
Wheel-legged amphibious mobile robot with variable attack angle
An amphibious and robotic technology, applied in the field of robotics, can solve the problems that the robot does not have the function of underwater operation, the robot steering control method is complex, and the amphibious cannot be realized, and achieves enhanced environmental adaptability, simple and effective design methods, and improved operation. The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0049] The object of the present invention is to provide a wheel-legged amphibious mobile robot with a variable angle of attack to solve the problems in the prior art. The robot has a compact structure and a simple structure. According to the requirements of three different modes of motion for the mobile performance of the robot, an amphibious mobile robot is innovatively proposed. At the same time, combined with the characteristics of the robot's own movement,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More