

Orchard inter-row navigation line extraction method based on 3D Lidar
An extraction method and a technology of navigation lines, which are applied in the fields of electromagnetic wave reradiation, radio wave measurement system, image data processing, etc., can solve problems such as error-prone, large amount of image processing data, and large environmental interference, and achieve low environmental interference , high real-time performance and low computational load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
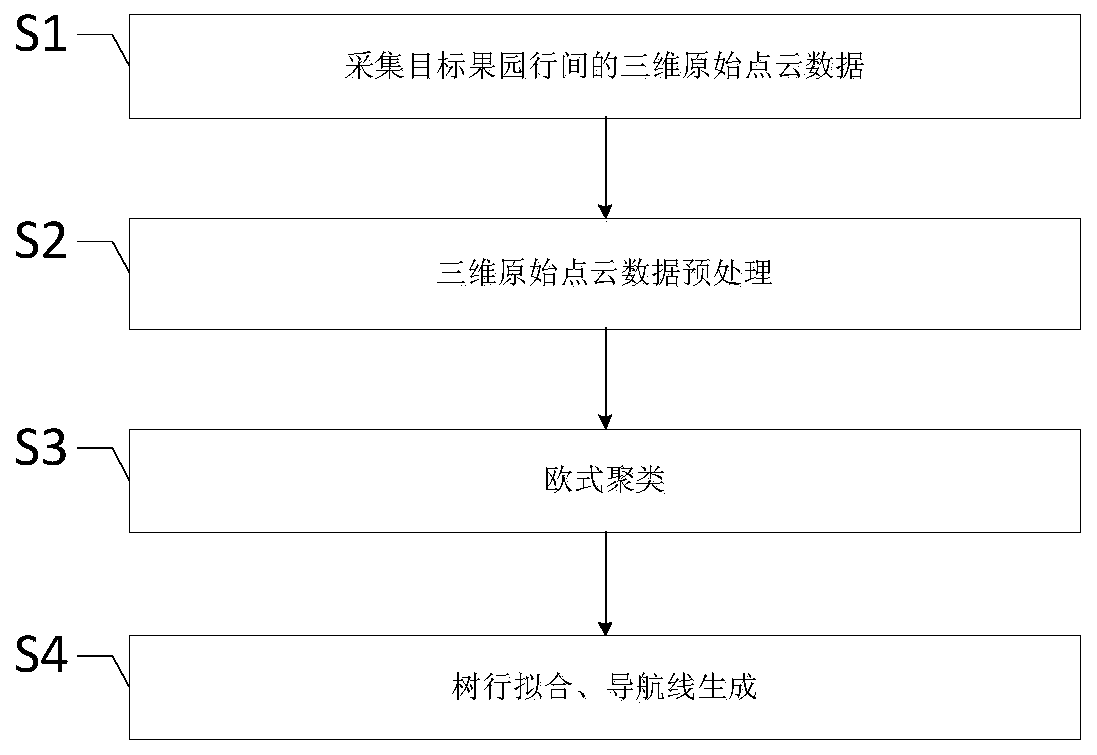
[0045] Such as figure 1 As shown, a kind of 3D Lidar-based orchard row navigation line extraction method of the present invention comprises the steps:
[0046] S1. Collect the three-dimensional original point cloud data between the rows of the target orchard;
[0047] The 3D original point cloud data between rows of the target orchard is collected by 3D Lidar, and the 3D coordinate system OXYZ is constructed.
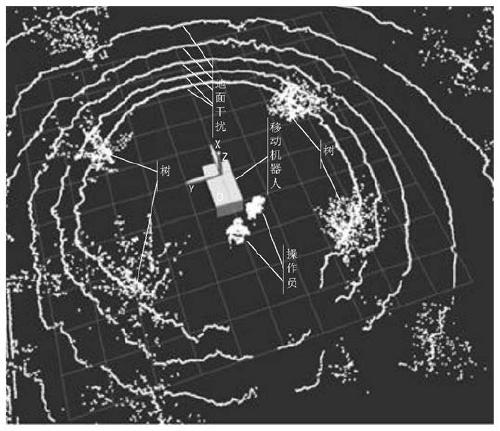
[0048] Such as figure 2 As shown, the block in the figure is the mobile robot. The geometric center of the mobile robot and the geometric center of the 3D Lidar are located on the Z axis perpendicular to the horizontal plane. The geometric center of the 3D Lidar is the origin O of the three-dimensional Cartesian coordinate system OXYZ. The movement of the mobile robot The direction is the X-axis, and the Y-axis is perpendicular to the X-axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More