

High-speed and high-sea-condition multi-body unmanned underwater vehicle capable of diving and control method thereof
An unmanned aircraft and sea state technology, applied in the direction of hull, hull design, underwater ships, etc., can solve the problems of lack of water, ship cabin water, waves on the deck, etc. controllable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
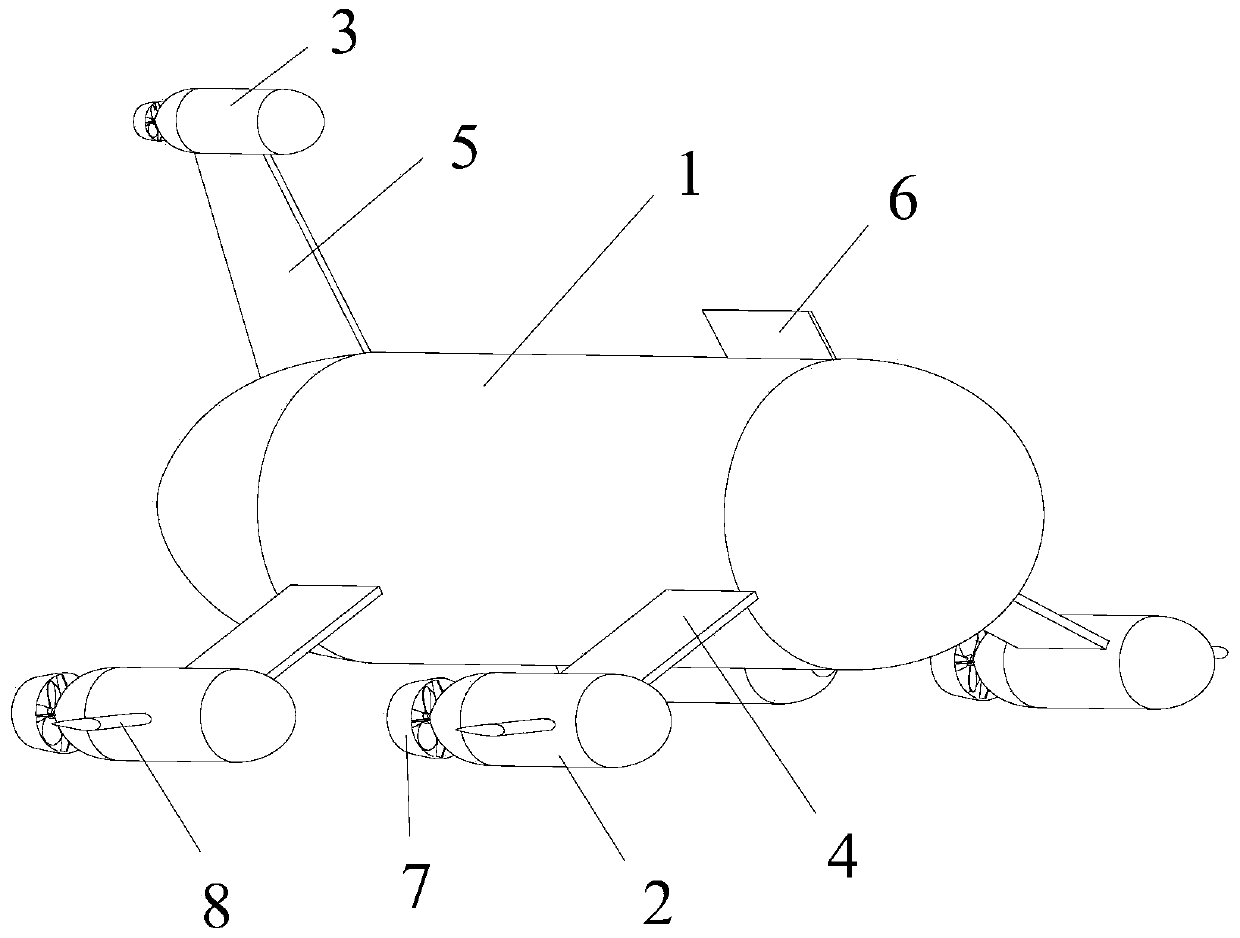
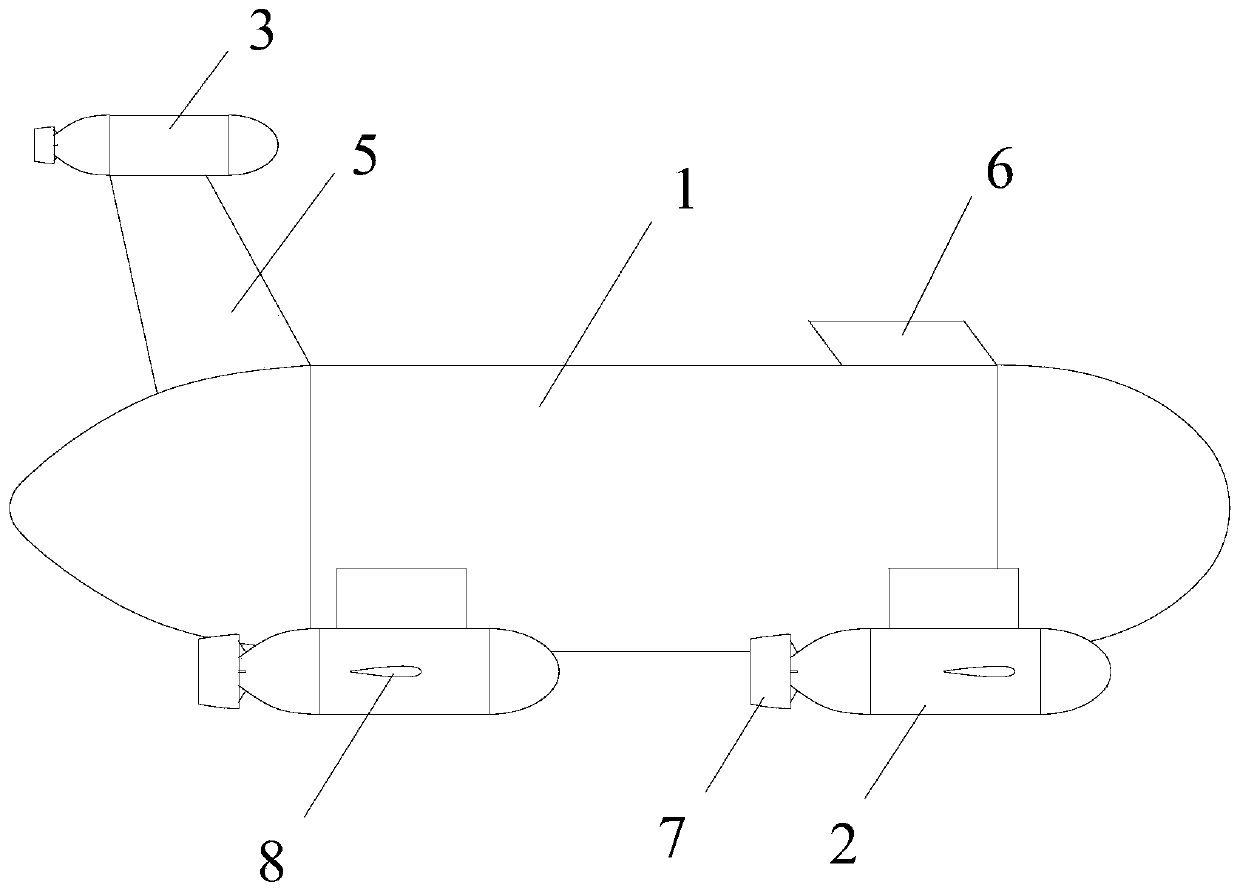
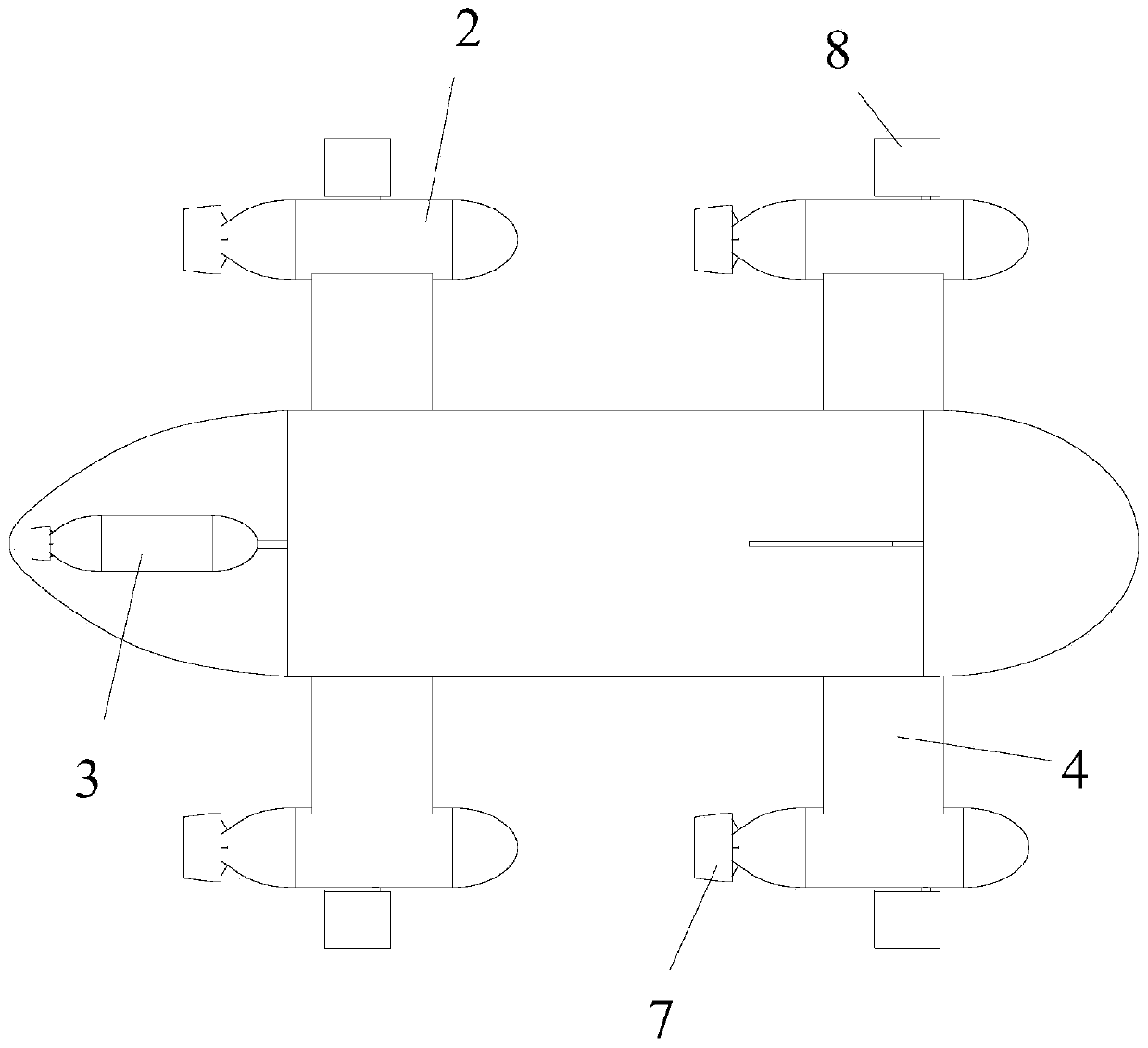
[0041] Such as figure 1 , figure 2 , image 3 with Figure 4 As shown, the present embodiment provides a multi-body unmanned aerial vehicle capable of submerging at high speed and high sea conditions, including: main hull 1, multiple propulsion sub-hulls 2, multiple wings 4, multiple horizontal rudders 8, tail fins 5 and communication sub-hull 3;
[0042] The two sides of the main hull 1 are connected to one side of the propulsion sub-hull 2 through the side wings 4, and the upper part is connected to the communication sub-hull 3 through the skeg 5, the other side of the propulsion sub-hull 2 is connected to the horizontal rudder 8, and the communication sub-hull 3 communicates with the main hull 1 Connected, the tail of the propulsion sub-hull 2 and the communication sub-hull 3 is connected with a propeller 7;
[0043] In this embodiment, the upper front end of the main hull 1 is equipped with a dorsal fin 6, and the main hull of this embodiment is equipped with si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More