

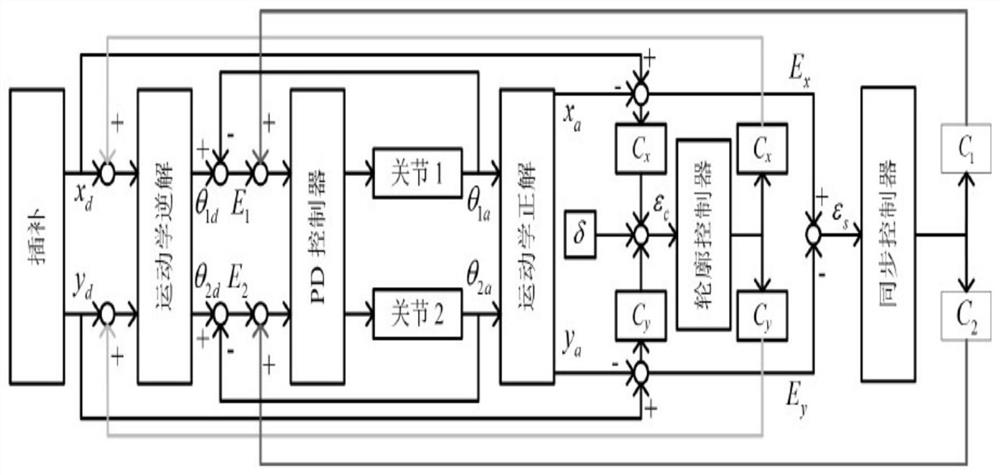
A Synchronous Cross-Coupling Robot Profile Control Method
A contour control and cross-coupling technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as the inability to apply industrial robot systems, and achieve the effect of improving control effects, ensuring tracking accuracy, and reducing contour errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0095] The contour trajectory is an ellipse, the radius of the desired center contour trajectory is set to 8cm, and the initial position of the end effector is (0.02, 0.35). The equation is:
[0096]
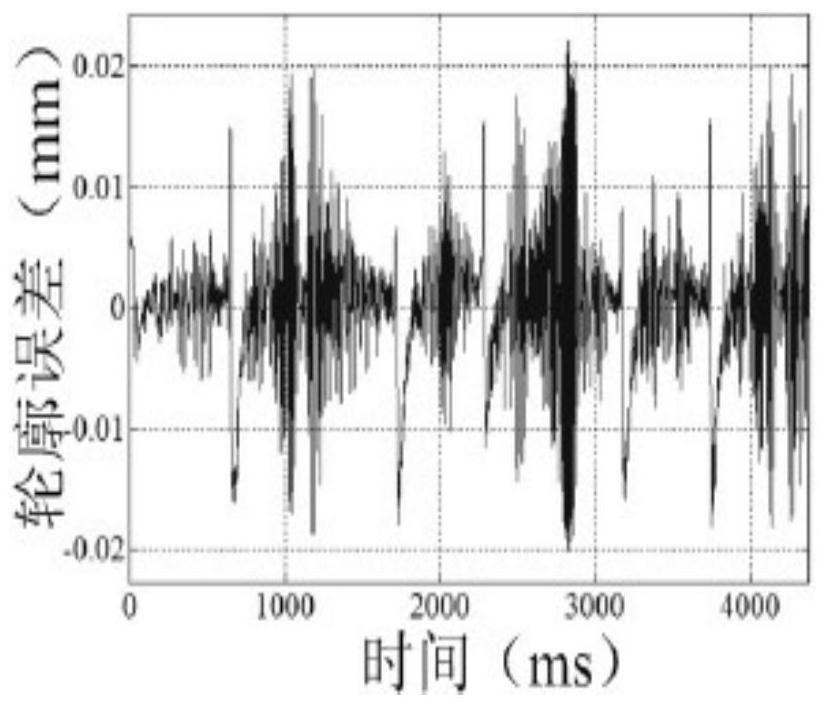
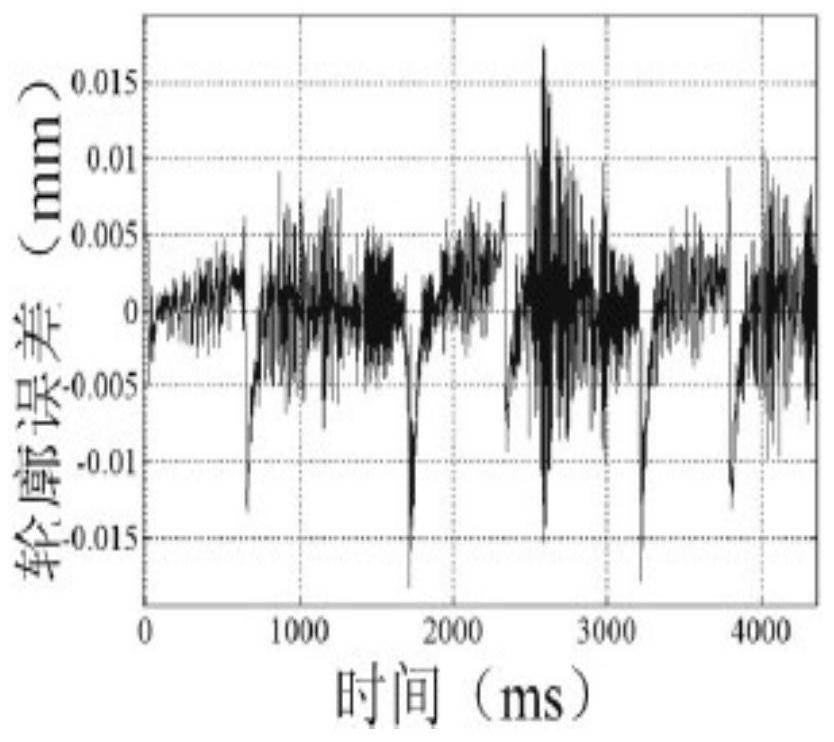
[0097]The angular velocity ω of executing the circular trajectory is set at low speed and medium speed to conduct experiments respectively. First, set the low speed state of ω=0.02rad / s, and the obtained motion profile error changes and experimental data are as follows: Figure 2a , Figure 2b , as shown in Table 2:
[0098] Table 2 Experimental data of low-speed circular trajectory
[0099]
[0100] The comparative experimental results show that the contour error of the synchronous cross-coupling control is significantly reduced, the maximum contour error is reduced by 3.12 μm, and the root mean square value is reduced by 1.63 μm.
[0101] Then the tracking angular velocity is set to the medium speed, that is, ω=0.04rad / s, and the variation of the motion profile error ...
Embodiment 2
[0107] The contour trajectory is an ellipse, the long radius of the desired center contour trajectory is 8cm, the short radius is 4cm, and the initial position of the end effector is (0.02, 0.35), which effectively ensures the movement process of the system in the workspace. The specific trajectory The equation is:
[0108]
[0109] The variation of motion profile error and experimental data obtained by setting ω=0.02rad / s are as follows Figure 4a , Figure 4b and as shown in Table 4:
[0110] Table 4 Low-speed elliptical trajectory experimental data
[0111]
[0112] In the same way, the experimental results of the elliptical profile comparison show that compared with the position loop cross-coupling control, the maximum error of the profile using the synchronous cross-coupling control is reduced by 6.21 μm, and the root mean square value is reduced by 1.11 μm.
[0113] It can be concluded that for the elliptical contour with more complex shape, the synchronous cros...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More