

Multi-turn using method of single-turn magnetic encoder at tail end of robot joint
A technology of robot joints and magnetic encoders, applied in the field of robotics, can solve the problems that single-turn magnetic encoders cannot perform multi-turn judgments, and achieve the effects of low cost, high precision, and less hardware
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
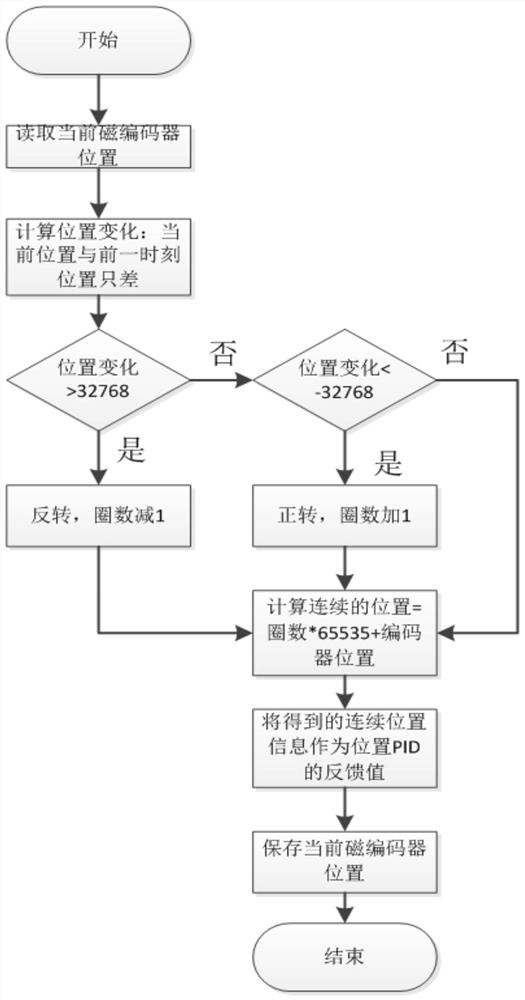
[0021] Such as figure 1 The multi-turn usage method of a single-turn magnetic encoder at the end of a robot joint includes the following steps:
[0022] Step 1: Establish a parameter reading module, a position analysis module, a calculation module and a storage module; the parameter reading module is used to read the position encoding data Q of the single-turn magnetic encoder t , where Q is the position encoding data, t is the time stamp; the position analysis module is used to analyze the position encoding data Q t ; The calculation module is used to calculate the number of turns of the current position encoding data;
[0023] In this embodiment, the parameter reading module, position analysis module and calculation module are all set in the same MCU or PLC controller.
[0024] Read the position of the single-turn magnetic encoder, judge the change between its current value and the previous time value, and set an appropriate incremental value according to the movement spee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More