

Rotary transformer angle measurement error hardware self-correction system and method
A resolver and self-calibration technology, applied in automatic recalibration, test/calibration devices, instruments, etc., can solve the problems affecting the angle measurement accuracy of the resolver, the inconsistency of the sine and cosine signal amplitudes, and the control accuracy of the servo system, etc., to achieve easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further elaborated below in conjunction with embodiment.
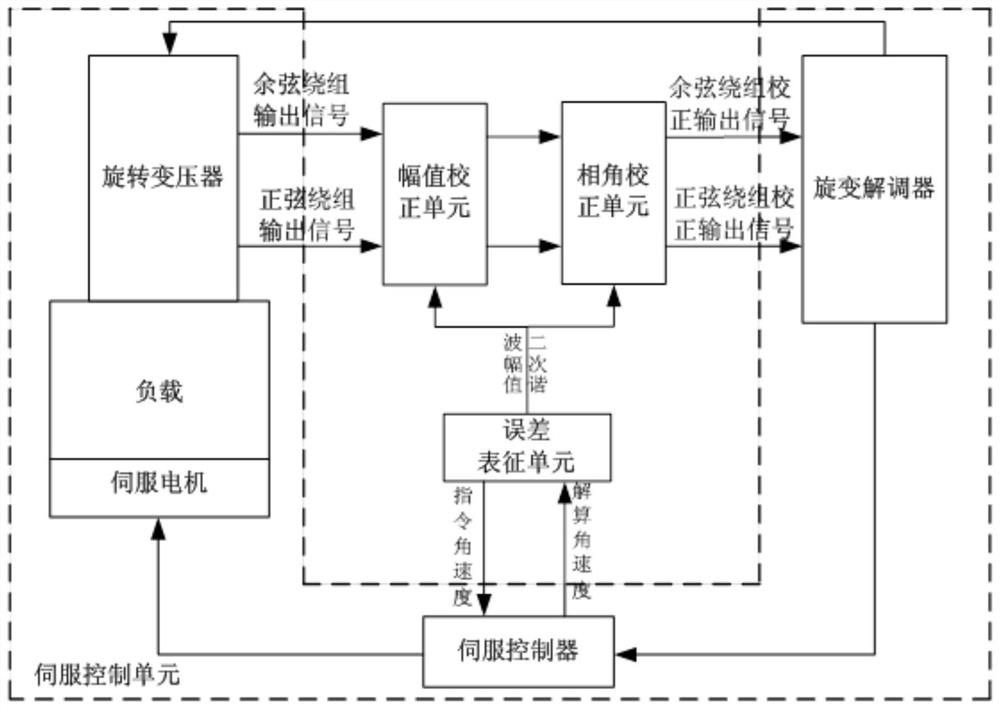
[0053] Such as figure 1 As shown, a resolver angle measurement error hardware self-correction system of the present invention includes: a servo control unit, an amplitude correction unit, a phase angle correction unit, and an error characterization unit;
[0054] The servo control unit is used to control the load to rotate stably according to the commanded angular velocity.
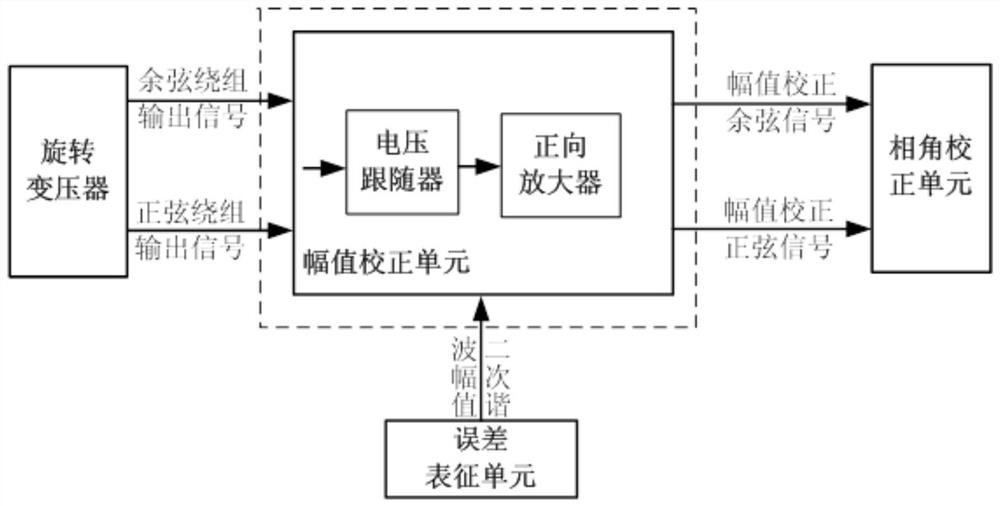
[0055] The amplitude correction unit is used to adjust the amplitude of the output signal of the sine-cosine winding output by the resolver to eliminate the amplitude error.
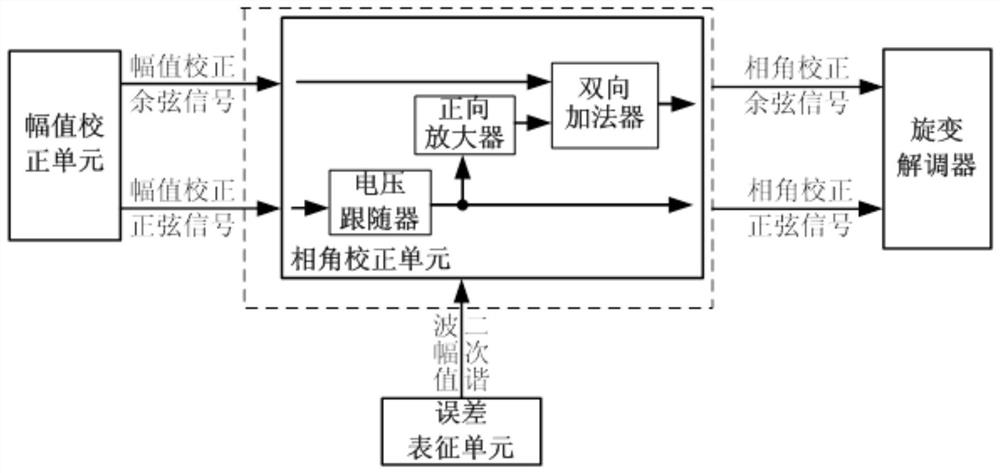
[0056] The phase angle correction unit is used to adjust the phase difference of the resolver output sine and cosine winding output signals to eliminate non-orthogonal errors.
[0057] The resolver error characterization unit sends command angular velocity to the control servo control unit, conducts frequency spectrum analysis on the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More