

Unmanned aerial vehicle task allocation method based on group entropy and Q learning
A task assignment, UAV technology, applied in the direction of instruments, data processing applications, resources, etc., can solve the problem of slow convergence speed of task assignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
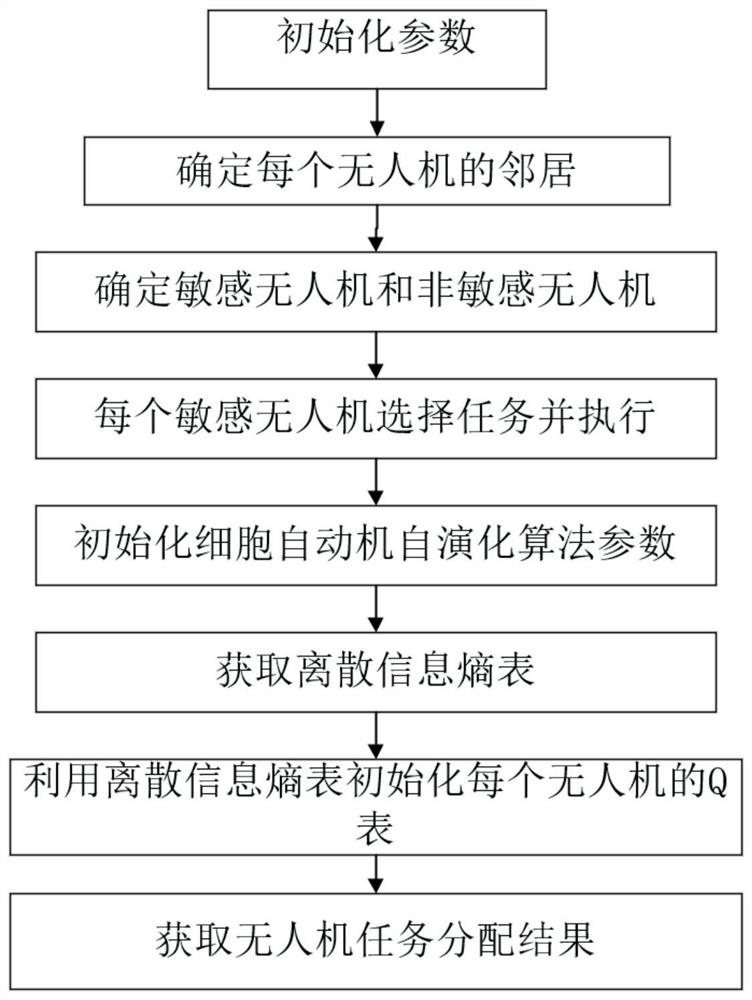
[0061] refer to figure 1 , the present invention comprises the following steps:
[0062] Step 1) Initialize UAV task assignment parameters:
[0063] The set of tasks to be executed in the space area with an initial size of X×Y×Z is Ta={ta 1 ,ta 2 ,...,ta i ,...ta m}, the UAV set is A={a 1 ,a 2 ,...,a j ,...,a n}, the jth UAV a j state C j ={c 1,j ,c 2,j ,...,c i,j ,... c m,j}, where ta i Represents the i-th task, m represents the total number of tasks, m≥2, n represents the total number of drones, n≥1, c i,j means a j For the state of the i-th task, c i,j =0 means no execution, c i,j =1 means execution, all unmanned aerial vehicles do not perform tasks before task assignment, in this embodiment, X=800 meters, Y=800 meters, Z=800 meters, m=10, n=1000;
[0064] Step 2) Determine each UAV a j Neighbors, neighbors ref...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More