

Vehicle moving method and system for intelligent vehicle
A technology for smart cars and vehicles, applied in the field of moving methods and systems for smart cars, can solve problems such as long-term blocking of cars and tight parking spaces, and achieve the effects of reducing disputes, saving time, and avoiding long-term blocking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
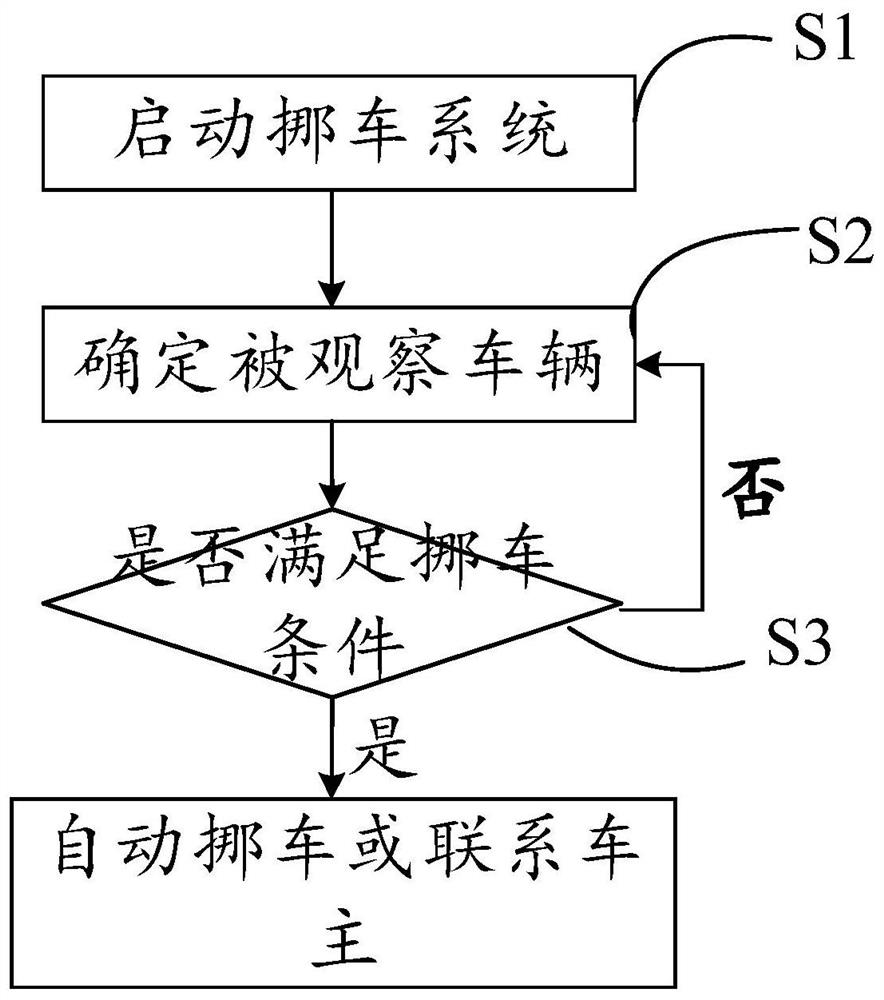
[0058] Such as figure 1 As shown, the present embodiment proposes a method for moving a smart car, including the following steps:
[0059] S1: Start the vehicle steering system; specifically, starting the vehicle steering system refers to putting the vehicle steering system into a state to be monitored, so as to perform corresponding actions when monitoring conditions are met.
[0060] S2: Determine the observed vehicle; the purpose of determining the observed vehicle is to effectively screen out surrounding vehicles that may be blocked by the own vehicle as the observed vehicle. In this way, the number of key monitoring vehicles can be effectively reduced, which is conducive to accurate monitoring and calculation of the observed vehicle, such as calculating the distance between the observed vehicle and the vehicle, judging the state of the observed vehicle, and predicting the state of the observed vehicle. running track etc. At the same time, unnecessary computation can be ...
Embodiment 2
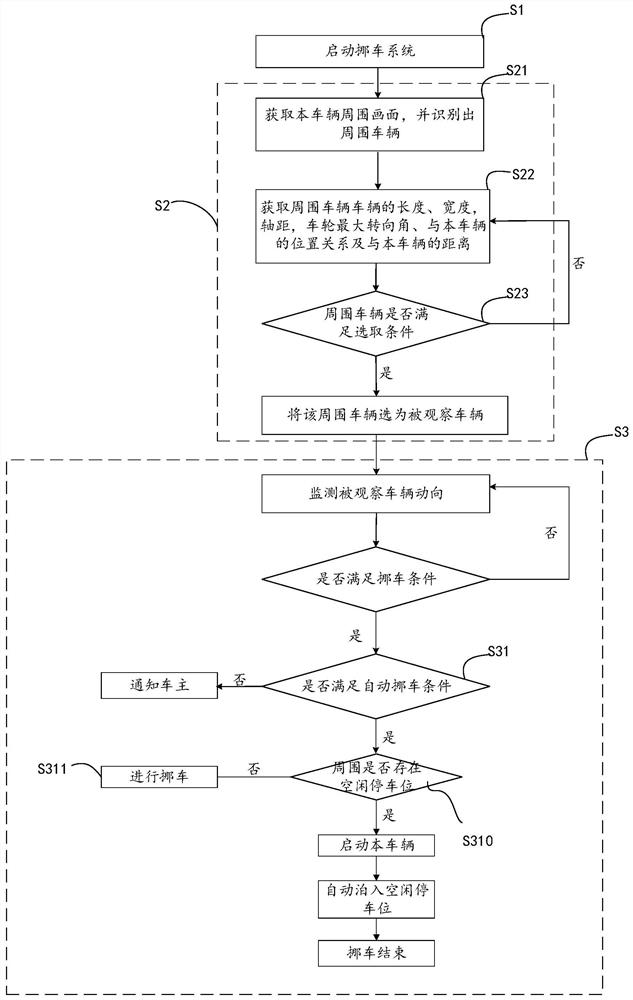
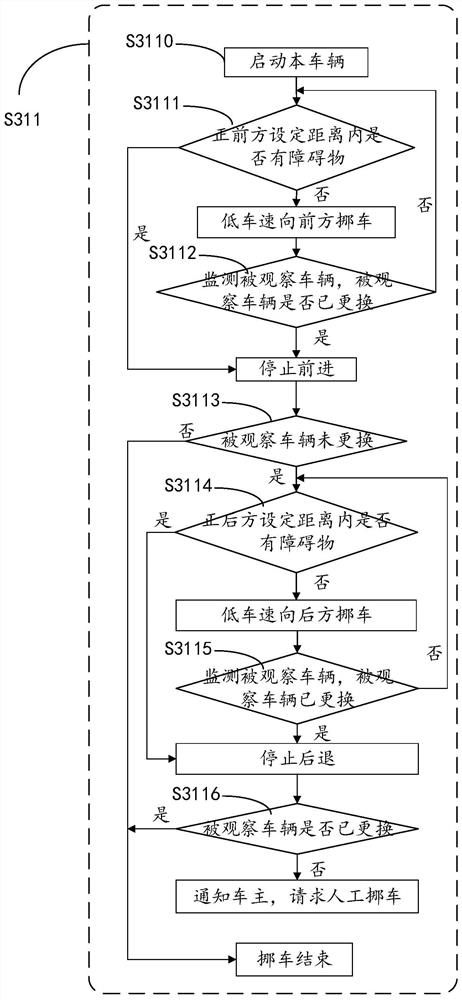
[0069] refer to figure 2 with image 3 , as shown, this embodiment is further improved on the basis of embodiment 1, and the same steps as in embodiment 1 will not be repeated, and the difference with embodiment 1 mainly lies in:
[0070] Step S2 comprises the following steps:
[0071] S21. Obtain the surrounding images of the vehicle, and identify the surrounding vehicles; during specific implementation, a 360° camera may be used to acquire the surrounding images of the target vehicle. Certainly, the image or video information around the vehicle can also be acquired through multiple cameras.
[0072] S22. Obtain the positional relationship between the surrounding vehicles and the own vehicle and the distance from the own vehicle; that is, through calculation, obtain the positional relationship between the surrounding vehicles and the own vehicle, for example, determine whether the surrounding vehicles are in the front, rear, or left side of the own vehicle or right side e...
Embodiment 3
[0090] refer to Figure 4 As shown, this embodiment discloses a car steering system for a smart car, including:
[0091] A camera, the camera is used to acquire images around the vehicle.
[0092] A control module, the control module is electrically connected to the camera, the control module acquires the surrounding images of the camera, and identifies and monitors the observed vehicle.
[0093] A distance sensor, the distance sensor is electrically connected to the control module; the distance sensor is used to measure the distance between the observed vehicle and the own vehicle, and the control module is also used to judge whether the maneuvering condition is satisfied.
[0094] A vehicle starting module, the vehicle starting module is electrically connected to the control module, and the control module is also used to start the vehicle through the vehicle starting module when the vehicle maneuvering condition is met.
[0095] A navigation module, the navigation module i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More