

Underwater target ranging method based on binocular vision
A technology of underwater target and ranging method, applied in the field of computer vision, can solve the problems of algorithm improvement, the underwater environment is not fixed, etc., to avoid the selection of thresholds, slow down the clustering phenomenon, and reduce the effect of mismatching points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
[0027] S1: Use the improved underwater calibration algorithm to calibrate the camera, get the internal and external parameters of the camera, and obtain the corrected binocular image of the underwater target;
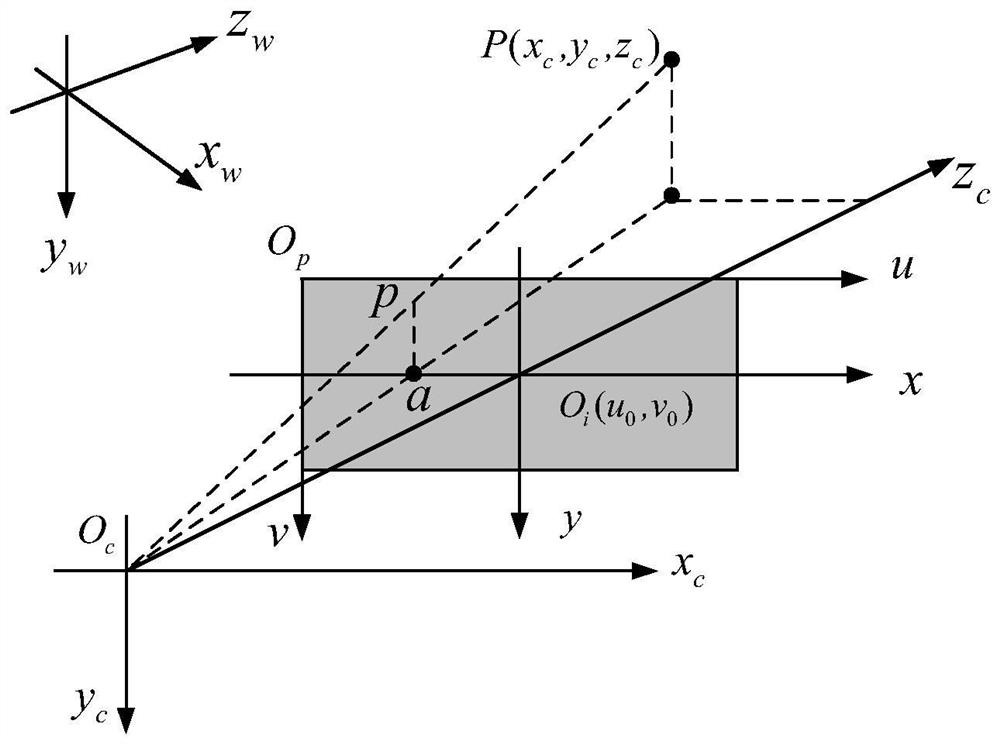
[0028] First, combined with the camera imaging model in the air, using the calibration method to restore the coordinates in the pixel coordinate system to the three-dimensional actual scene requires four coordinate systems, namely the pixel coordinate system (PCS), the image coordinate system (ICS), and the camera coordinate system. (CCS) and world coordinate system (WCS), figure 1 is a schematic diagram of the four major coordinate systems, where the pixel coordinate system is based ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More