A navigation mark intelligent collision avoidance method and system
A navigation mark and collision avoidance technology, applied in the direction of navigation calculation tools, instruments, measuring devices, etc., can solve the problems of unreceived position data, communication congestion, large estimation error, etc., to facilitate ship navigation, improve convergence accuracy, and high estimation The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
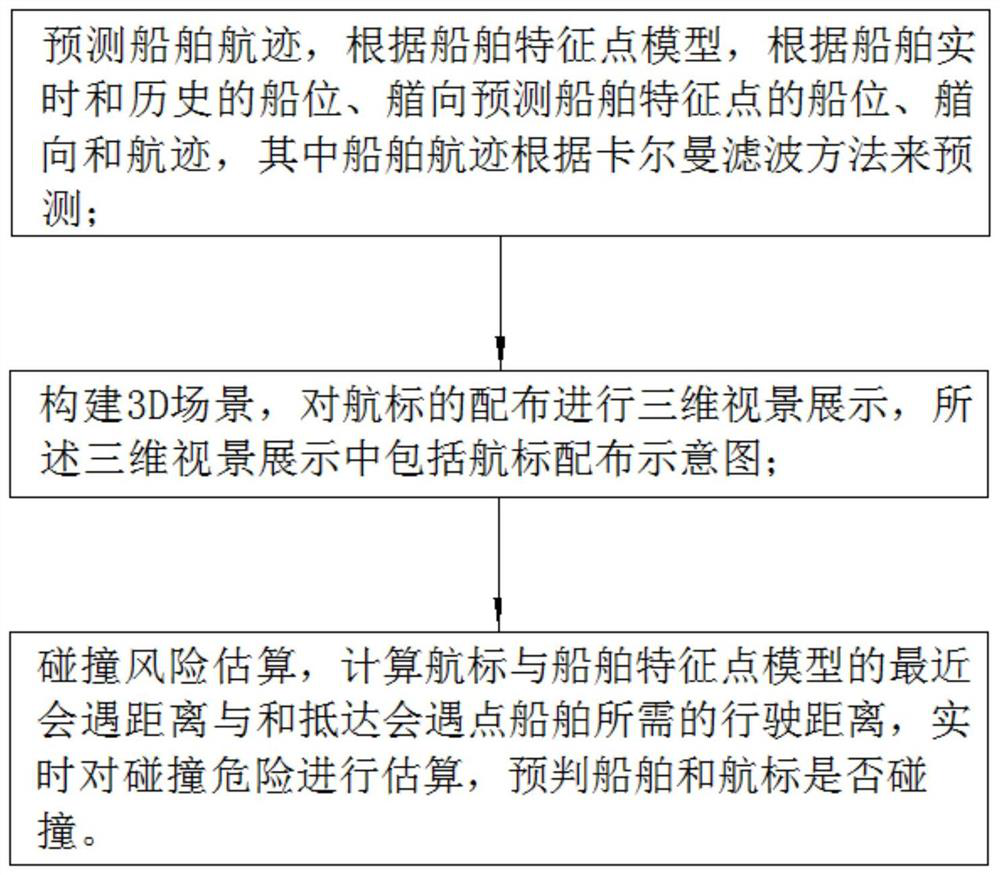
[0034] like figure 1 As shown in the figure, this specific embodiment discloses a method for intelligent collision avoidance of navigation marks, which realizes intelligent prediction and early warning of collision risk between ships and navigation marks by predicting the ship's track, constructing a 3D scene and estimating collision risk;
[0035] Among them, predicting the ship's track is based on the ship's feature point model, acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More