

Speed control method for loaded quadrotor unmanned aerial vehicle with known model parameters
A four-rotor UAV, speed control technology, applied in vehicle position/route/height control, adaptive control, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0067] In this embodiment, the speed control method of the four-rotor UAV with load with known model parameters comprises the following steps:
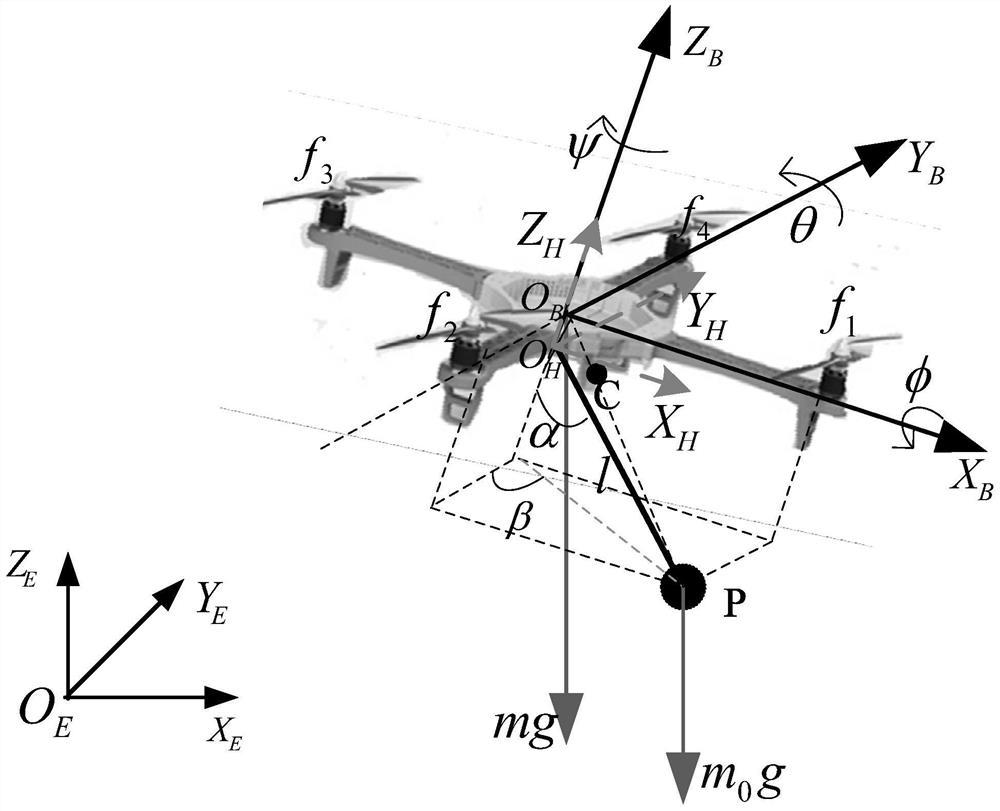
[0068] 1) Establish a dynamic model of the quadrotor UAV with load, including:
[0069] In order to accurately describe the attitude and position information of the quadrotor UAV with a suspended load, the following coordinate system is defined:
[0070] ①Earth fixed coordinate system (e system)
[0071] Also known as the ground coordinate system, expressed as O e =(X e ,Y e ,Z e ). Take the center of the earth as the origin of coordinates O e , X e The axis points in a certain direction in the horizontal plane, Z e The axis is perpendicular to the ground and upwards. Then, Y is determined by the right-hand rule e axis.
[0072] ②Body coordinate system (b system)
[0073] Also known as body axis sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More