Robot for human ankle joint training
An ankle joint and robot technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of inability to meet the convenience requirements of ankle joint rehabilitation training, and the robot has few practical applications, and achieves a small occupied space, a simplified structure, and a Great tonal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
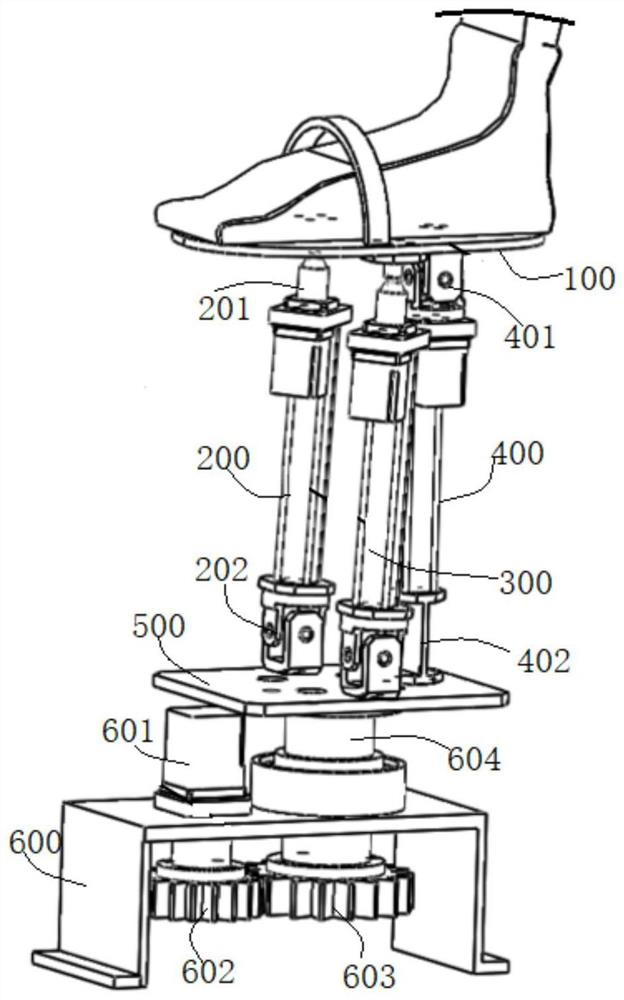
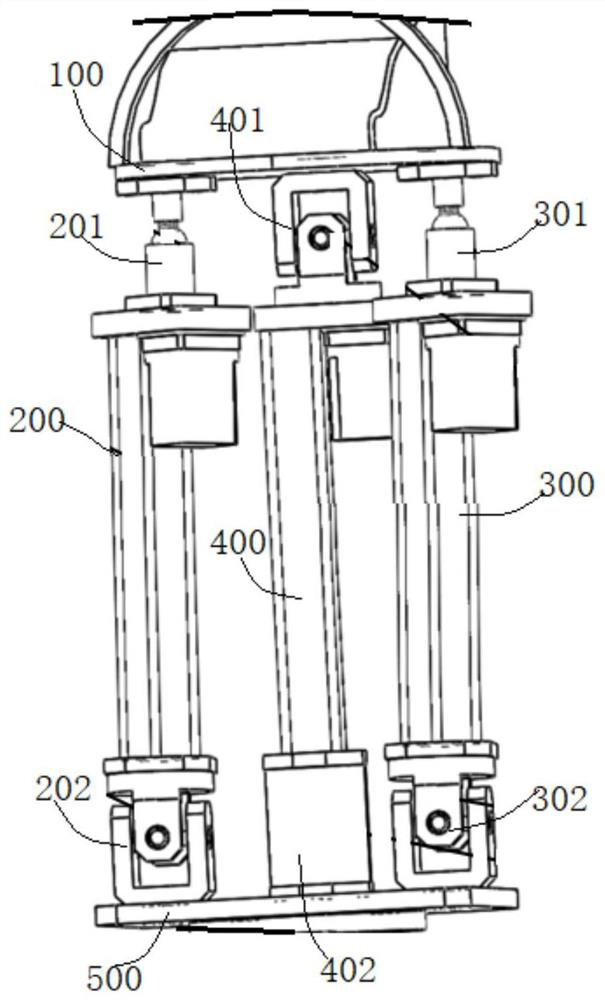
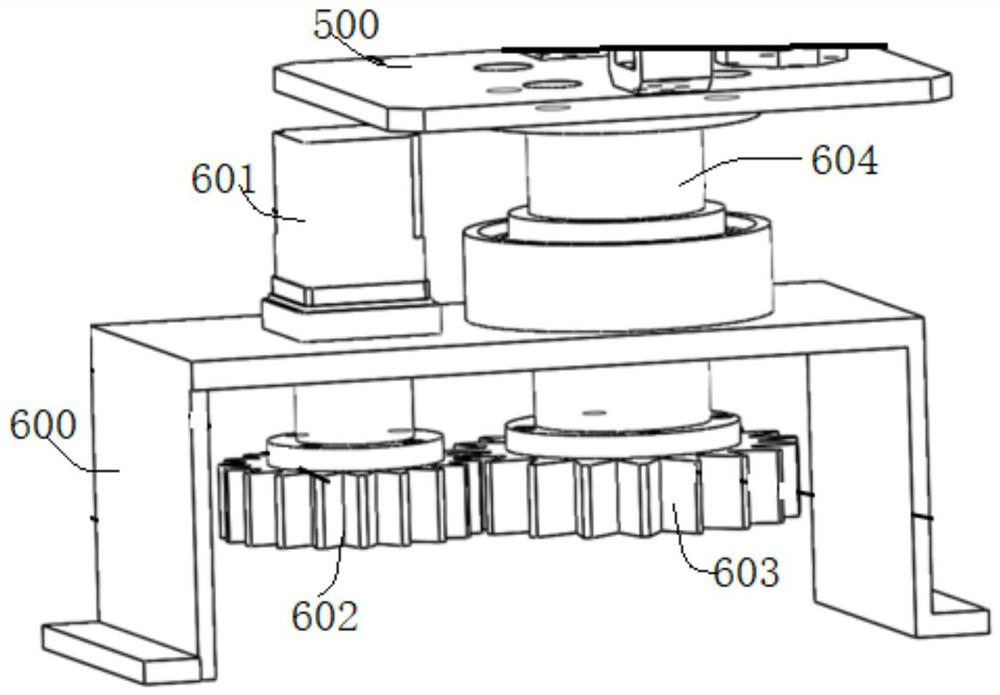
[0033] Such as Figure 1-Figure 5 As shown, a human ankle joint training robot of this embodiment includes fixed pedals 100 and a static platform 500 distributed up and down, a parallel mechanism is arranged between the fixed pedals 100 and the static platform 500, and a drive mechanism is provided below the static platform 500. Its rotating rotary mechanism, wherein the parallel mechanism includes the first driving module 200, the second driving module 300 and the third driving module 400 in a triangular distribution, and the electric cylinder driving module can be used specifically; the first driving module 200 and the top of the second driving module 300 are respectively connected to the fixed pedal 100 through a ball joint, and the bottom ends of the first driving module 200 and the second driving module 300 are respectively connected to the static platform 500 through a Hooke hinge; specifically, The top of the first driving module 200 is connected with the fixed pedal 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com