

A variable stiffness linear drive device and a variable stiffness method
A linear drive, linear drive technology, applied in the direction of manufacturing tools, claw arms, manipulators, etc., can solve the problems of high cost, large volume, limited available scenarios, etc., to achieve the effect of high space utilization and improved adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
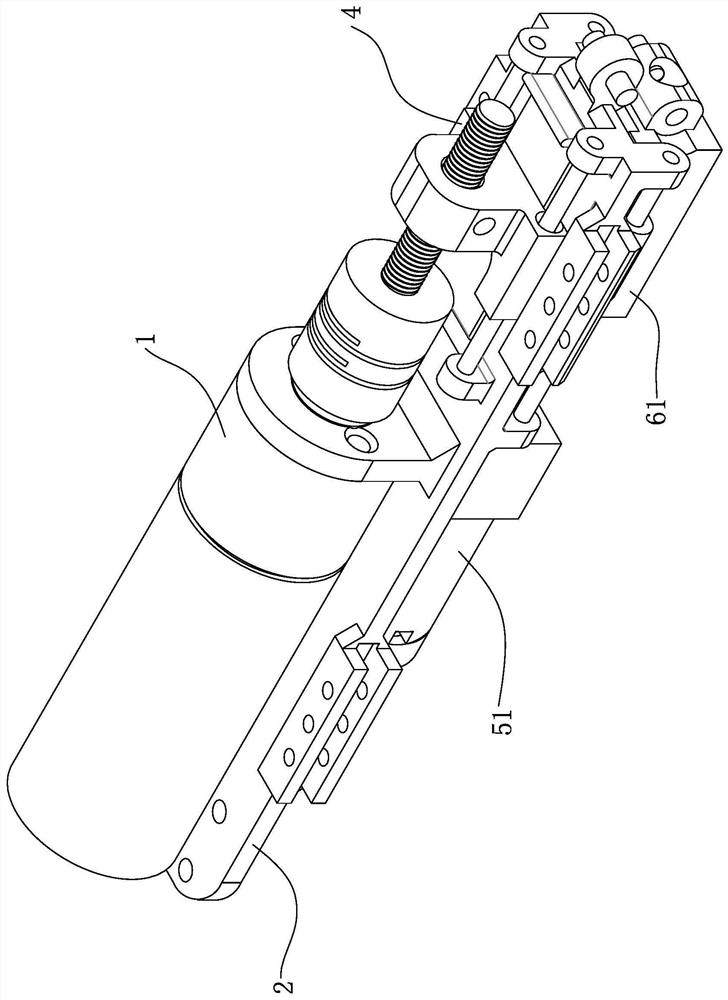
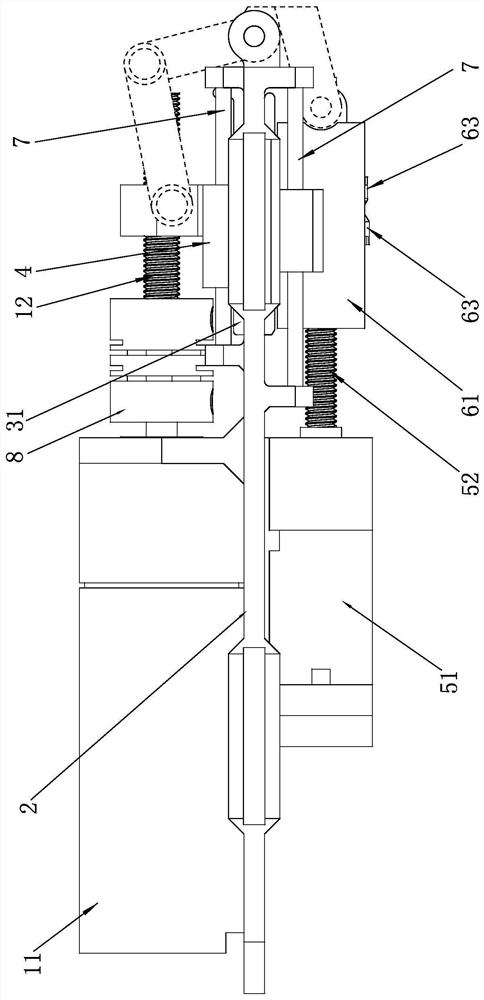
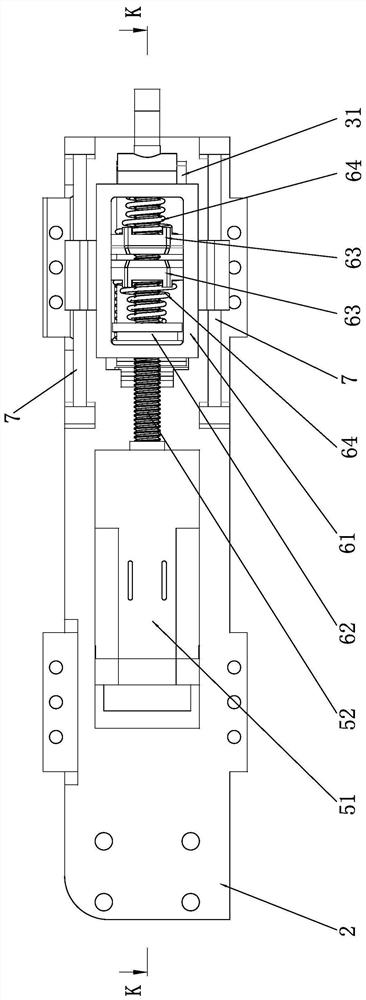
[0039] see Figure 1-Figure 7 As shown, a variable stiffness linear drive device of this embodiment includes a first linear drive 1, a second linear drive, a variable stiffness module, a tongue assembly and a frame 2;
[0040] The first linear driver 1 is arranged on one side of the frame 2, and the first linear driver 1 drives the slider 4 to move on the frame 2; the frame 2 is provided with a touch tongue assembly, and the touch tongue assembly includes a touch tongue 31 and Spring 32; the two ends of the spring 32 lean against the touch tongue 31 and the frame 2, and the touch tongue 31 can be driven and moved by the slider 4;
[0041] The second linear driver includes a second screw 52 driven by a second motor 51, the second motor 51 is fixed on the other side of the frame 2, and the variable stiffness module includes a module seat 61, an axial thrust rotating member 62, two Drive nut 63 and two non-linear springs 64, the second screw mandrel 52 is covered with slidable m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More