

Double-layer collaborative optimization method for ramp merging of networked vehicles
A collaborative optimization and vehicle technology, applied in the field of intelligent control of connected vehicles, can solve the problems of optimizing the vehicle merging sequence without considering microscopic performance, ignoring the difficulty of calculation, and the optimality cannot be guaranteed, so as to achieve traffic efficiency and energy utilization. improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The specific implementation of a two-layer collaborative optimization method for networked vehicle ramp merging according to the present invention will be described in detail below in conjunction with the accompanying drawings:
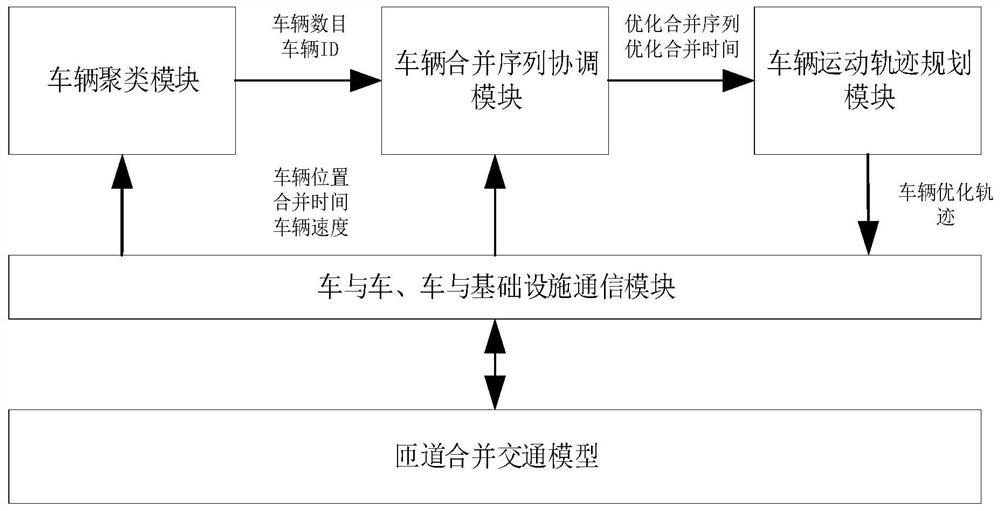
[0053] figure 1 It is a framework for intelligent network-connected vehicle ramp merge collaborative control, which mainly includes four modules and a model: vehicle clustering module, vehicle merge sequence coordination module, vehicle trajectory planning layer, infrastructure communication module and ramp merge traffic model.
[0054]There is a complete communication network between modules and models for necessary information interaction. The vehicle clustering module and the vehicle merging sequence coordination module collect the vehicle parameters and real-time information in the ramp merging traffic model through the infrastructure communication module, and solve the optimal merging sequence of vehicles and the optimal time to enter the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More