

A connection cable structure for robot underwater operation
A technology for underwater operation and connecting cables, which is applied in the direction of underwater operation equipment, bendable cables, insulated cables, etc., can solve the problems of large buoyancy of water flow, small adaptable range, single depth, etc., and achieves wide application range, Enhance the structural strength and increase the effect of rebound performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
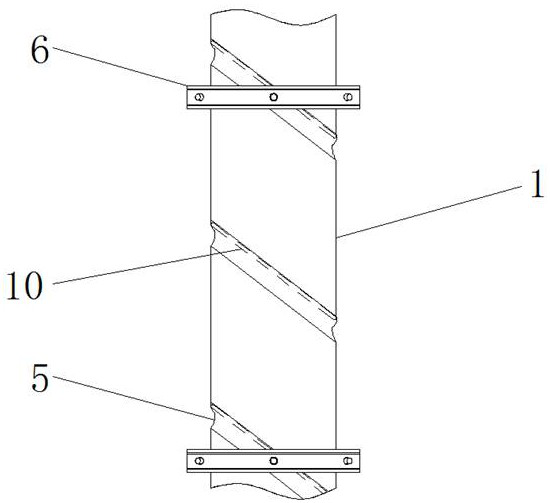
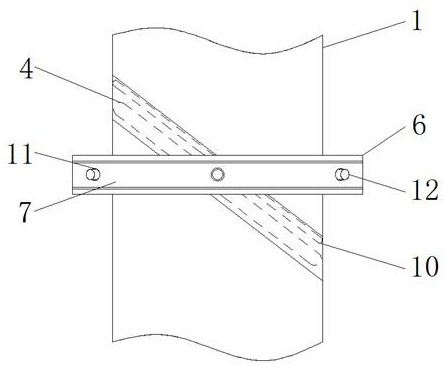
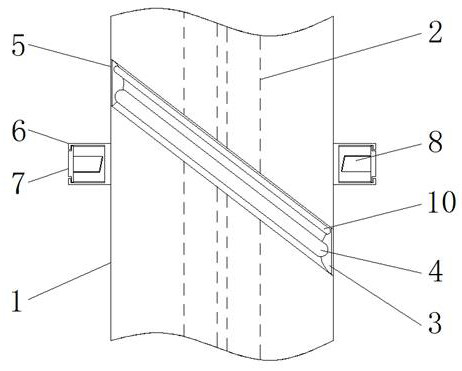
[0025] see Figure 1-7 , the present invention provides a technical solution: a connection cable structure for underwater operation of a robot, including a cable body 1, a wire core 2, an accommodation groove 3, a flexible tube 4, a sealing layer 5, a fixing ring 6, a sealing plate 7, a power Plate 8, air outlet pipe 9, anti-folding rod 10, air hole 11, blocking block 12, connecting rod 13, mounting plate 14 and spring 15, the inside of the cable body 1 is pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More