

Self-adaptive curvature device and facade operation robot based on permanent magnet adsorption
An adaptive and robotic technology, applied in the field of mobile robots, can solve problems such as inapplicability, inability to adapt to the curvature of the working surface, and no flexible deformation device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
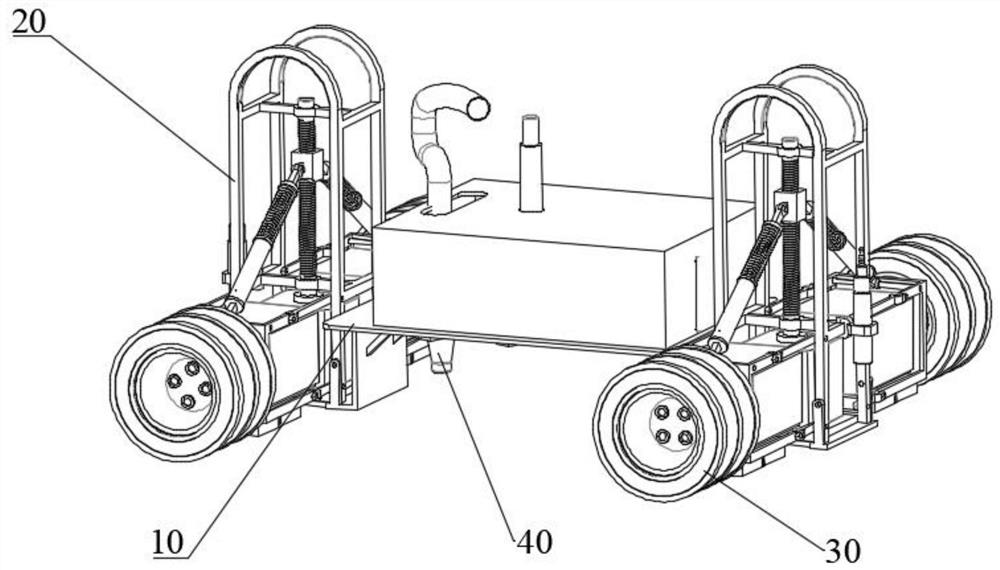
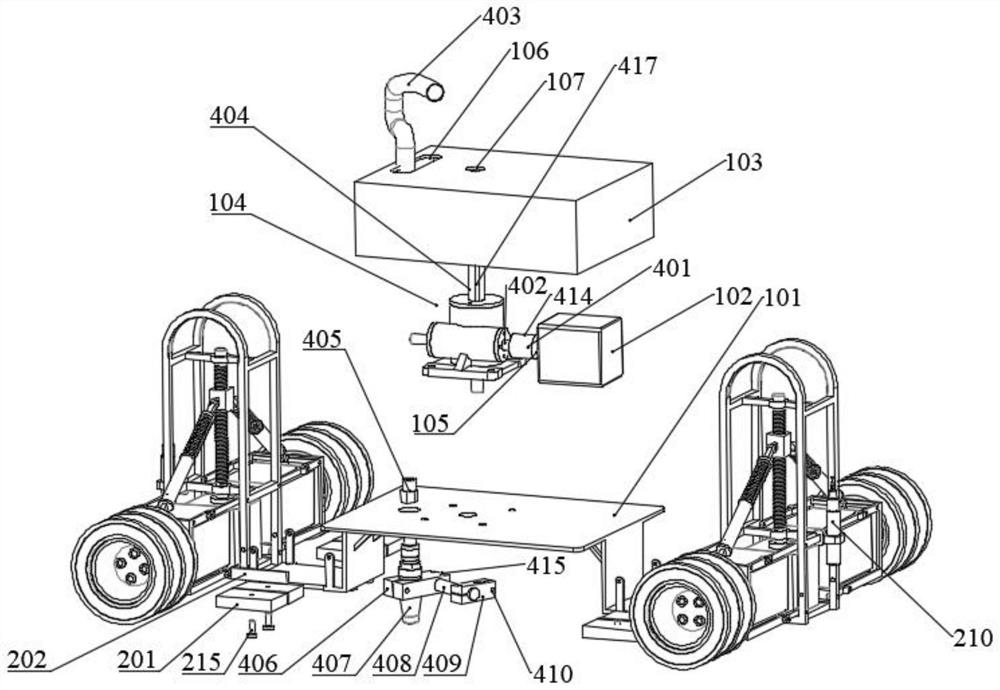
[0032] The following describes an adaptive curvature device 20 according to an embodiment of the present invention and a permanent magnet adsorption facade operation robot using the device with reference to the accompanying drawings.
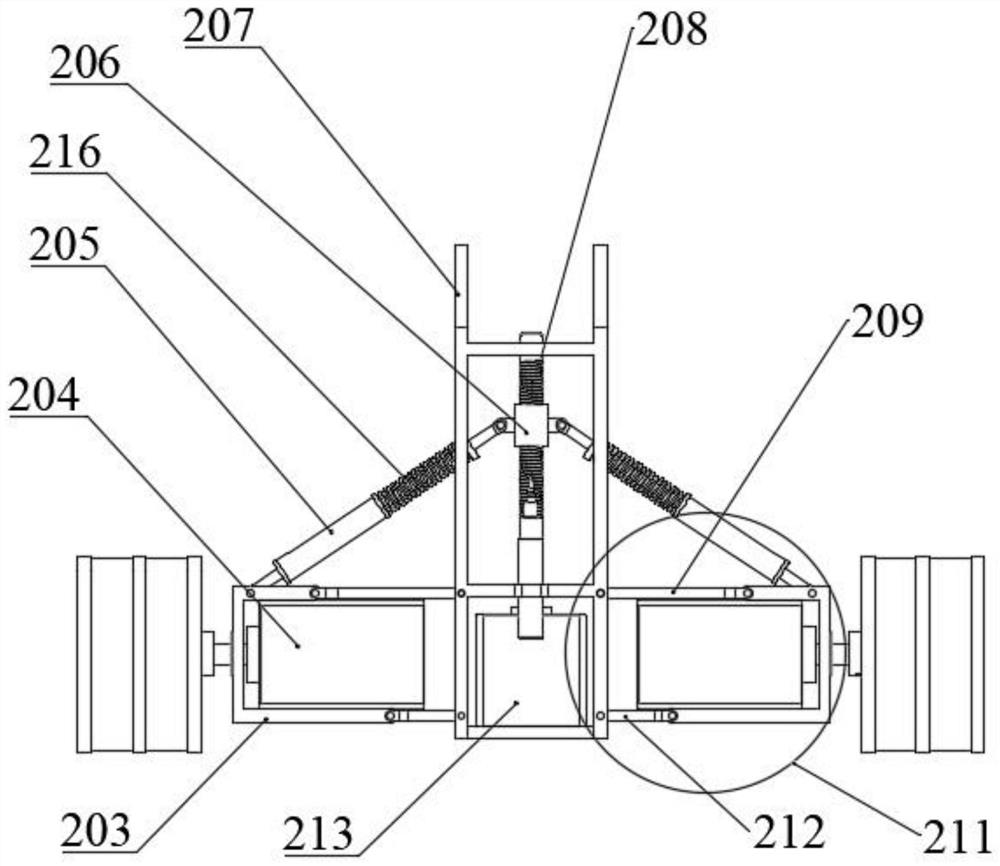
[0033] Adaptive curvature device 20 of the present invention (see image 3) comprises: frame structure 207, damping spring 205, lead screw 1 208, slide block 206, upper link 209, lower link 212, two motion control boxes 203,
[0034] The frame structure 207 extends along the height direction, and the servo motor 2 213 is fixedly installed in the lower frame of the frame structure 207, the output end of the servo motor 2 213 is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More