

Control method and device of inspection robot and robot inspection system
A technology of inspection robot and control method, which is applied in control/adjustment system, two-dimensional position/channel control, non-electric variable control and other directions, can solve problems such as poor ability to avoid roadblocks, low control accuracy, and low inspection efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
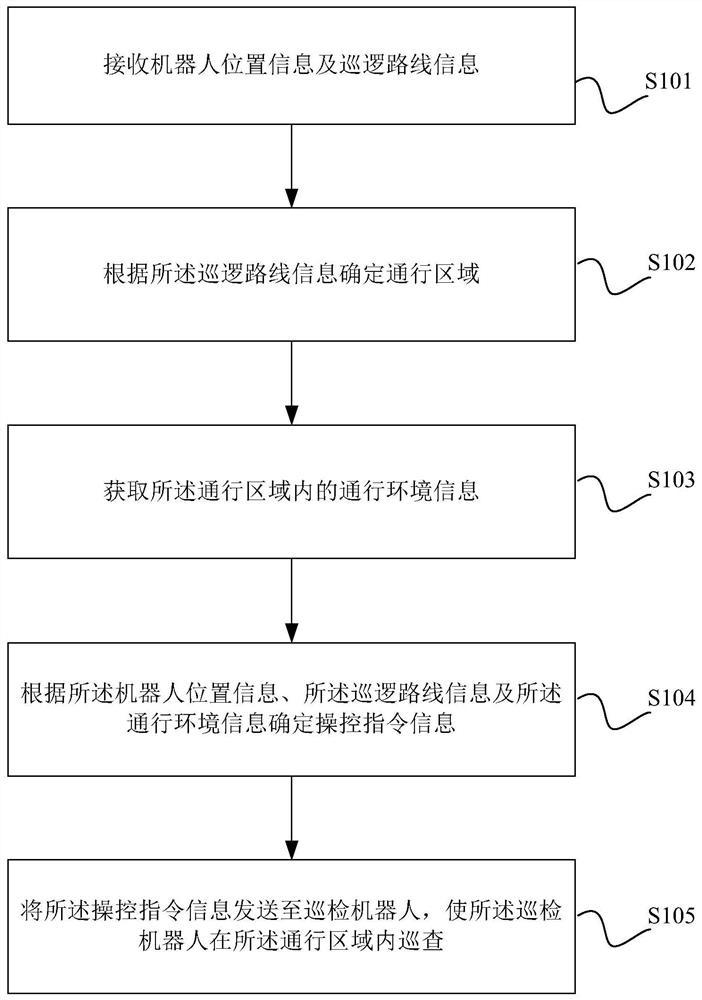
[0051] The core of the present invention is to provide a control method for an inspection robot, and a flow diagram of a specific implementation thereof is as follows: figure 1 As shown, it is called the first specific implementation mode, including:
[0052] S101: Receive robot location information and patrol route information.
[0053] S102: Determine a passing area according to the patrol route information.
[0054] S103: Obtain passing environment information in the passing area.
[0055] The passing environment information may include information on the location of roadblocks, pedestrians or potholes, which may be obtained through a visible light camera or an infrared camera.
[0056] When the passing environment information includes pedestrian information, a relatively high update frequency can be used to grasp the position of the pedestrian in real time, so as to avoid collision between the pedestrian and the inspection robot.
[0057] S104: Determine manipulation in...
Embodiment approach
[0095] As a preferred implementation manner, the environment acquisition module includes:
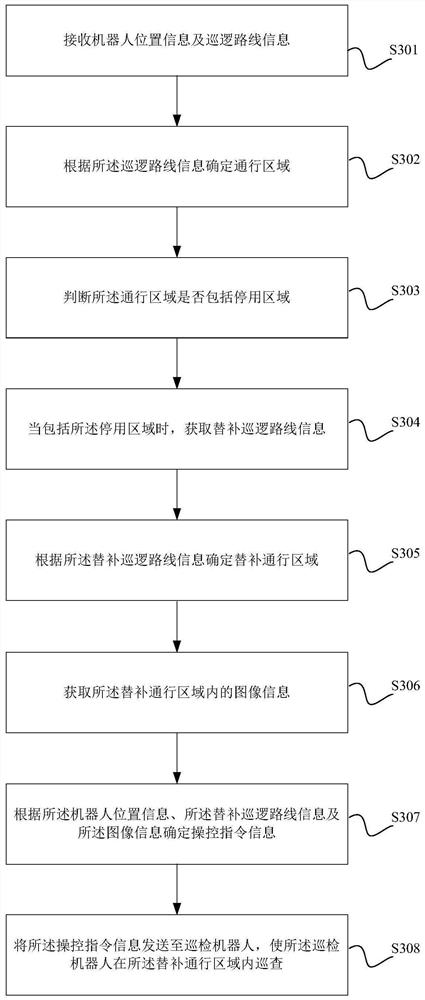
[0096] An image acquisition unit, configured to acquire image information in the passing area.
[0097] The control device of the inspection robot provided by the present invention is used to receive robot position information and patrol route information through the receiving module 100; the area determination module 200 is used to determine the passing area according to the patrol route information; the environment acquisition module 300, It is used to obtain the passing environment information in the passing area; the instruction module 400 is used to determine the manipulation instruction information according to the robot position information, the patrol route information and the passing environment information; the sending module 500 is used to send the Send the above-mentioned control command information to the inspection robot, so that the inspection robot patrols in the passing...
specific Embodiment approach 5
[0103] The present invention also provides a robot inspection system, a structural schematic diagram of a specific implementation is as follows Figure 5 As shown, it is called the fifth embodiment, including roadside controller and inspection robot;
[0104] The roadside controller 20 is configured to execute the steps of the control method of the inspection robot 10 described in any one of the above;
[0105] The roadside controller 20 includes an environmental information collector for collecting the traffic environment information;
[0106] The inspection robot 10 is used for inspection in the passing area.
[0107] It should be noted that the inspection robot 10 is a two-wheeled inspection robot 10 . At present, the inspection robot 10 is mainly a single intelligent robot. This type of robot is expensive and has relatively large limitations, and most of the inspection robots 10 are four-wheel inspection robots 10 and crawler-type inspection robots 10. The inspection ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More