

A device and method for identifying, positioning and grasping easily deformable wires
A technology of identification, positioning and easy deformation, which is applied in the field of automation, can solve the problem of insufficient grasping accuracy, achieve the effects of improving grasping accuracy, enhancing competitiveness, and reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
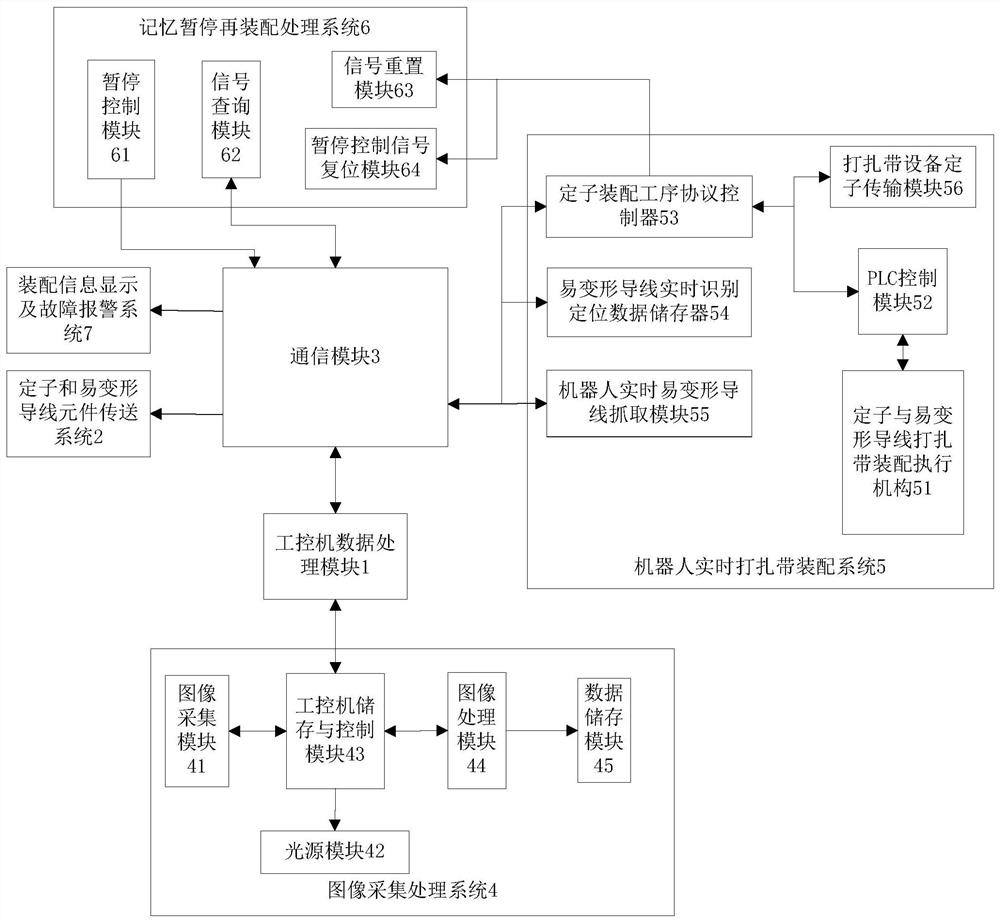
[0082] Such as figure 1 As shown in the figure, a device for identifying, locating and grabbing deformable wires includes an industrial computer data processing module 1, a stator and a deformable wire element transmission system 2, a communication module 3, an image acquisition and processing system 4, and a robot for real-time tying with assembly system 5; where,
[0083] The data processing module 1 of the industrial computer is used to process data;
[0084] The stator and easily deformable wire element conveying system 2 is used for conveying the stator and easily deformable wire element;
[0085] The communication module 3 is used for communication transmission;
[0086] The image acquisition and processing system 4 includes:
[0087] An image acquisition module 41, configured to acquire a three-dimensional image;
[0088] A light source module 42, configured to provide a light source to assist the image acquisition module 41 to acquire images;
[0089] The industri...
Embodiment 2
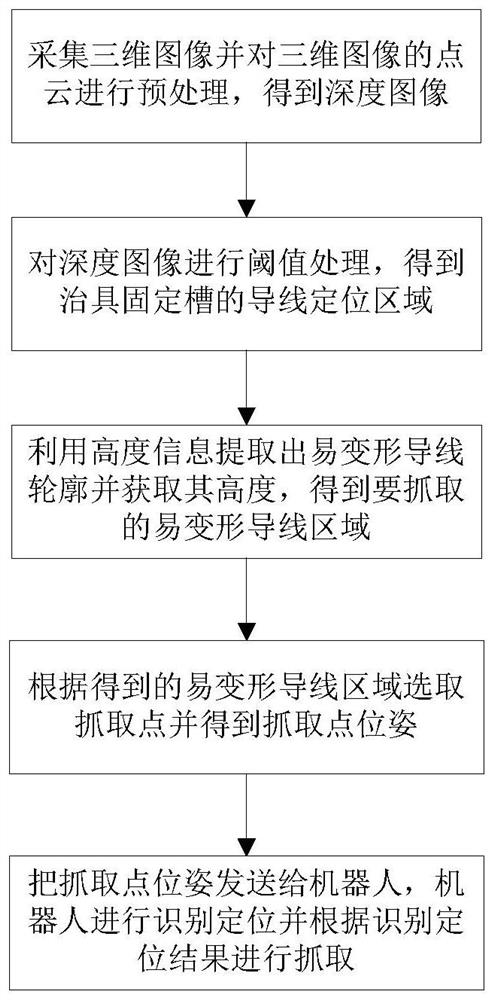
[0110] Such as figure 2 As shown, a method for identifying, locating, and grasping deformable wires is implemented based on the device for identifying, locating, and grasping deformable wires, including the following steps:
[0111] S1: Collect a 3D image and preprocess the point cloud of the 3D image to obtain a depth image;
[0112] S2: Perform threshold processing on the fixed height in the depth image to obtain the wire positioning area of the fixture fixing groove;
[0113] S3: Using the height information to extract the outline of the easily deformable wire and obtain its height, and obtain the area of the easily deformable wire to be grasped;
[0114] S4: Select the grasping point according to the obtained easily deformable wire area and obtain the pose of the grasping point;
[0115] S5: Send the pose of the grasping point to the robot, and the robot performs identification and positioning and grasps according to the identification and positioning results.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More