

Device and method for identifying, positioning and grabbing easily-deformed wire
A technology of identification, positioning and easy deformation, which is applied in the field of automation and can solve the problem of insufficient grasping accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
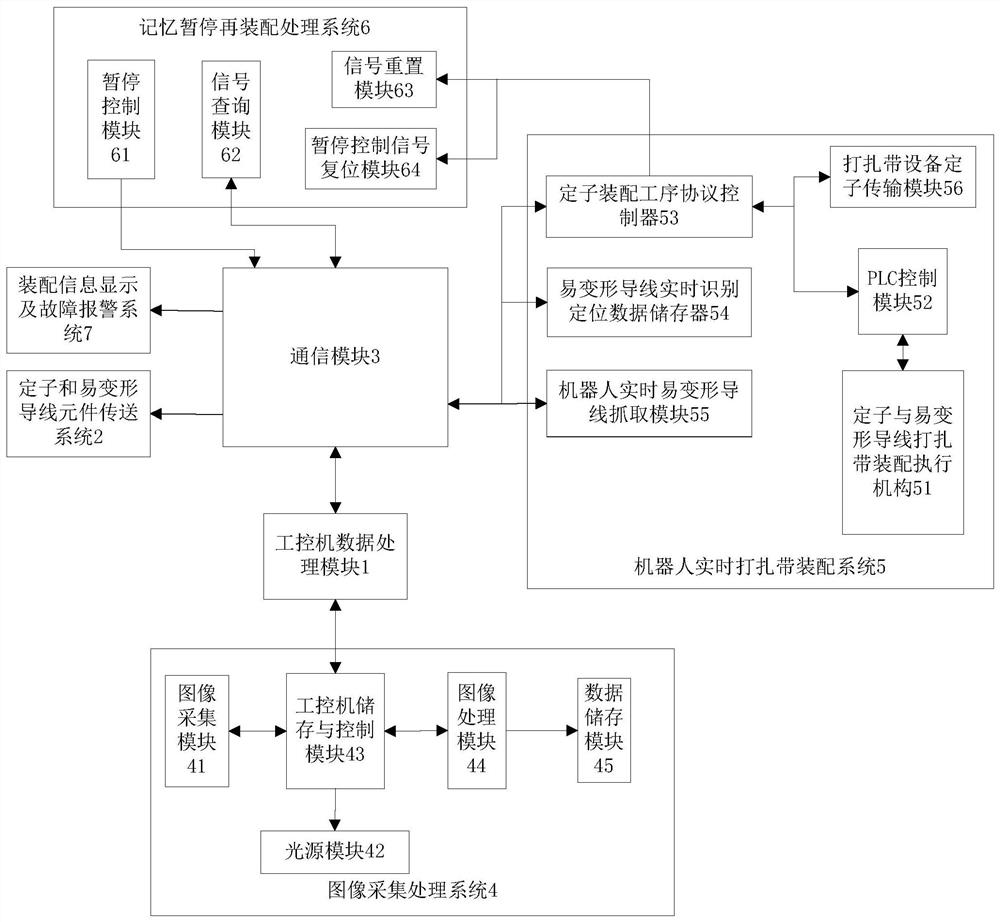
[0082] like figure 1 As shown in the figure, a device for identifying, locating and grabbing deformable wires includes an industrial computer data processing module 1, a stator and a deformable wire element transmission system 2, a communication module 3, an image acquisition and processing system 4, and a robot for real-time tying with assembly system 5; where,
[0083] The data processing module 1 of the industrial computer is used to process data;
[0084] The stator and easily deformable wire element conveying system 2 is used for conveying the stator and easily deformable wire element;
[0085] The communication module 3 is used for communication transmission;
[0086] The image acquisition and processing system 4 includes:
[0087] An image acquisition module 41, configured to acquire a three-dimensional image;
[0088] A light source module 42, configured to provide a light source to assist the image acquisition module 41 to acquire images;
[0089] The industrial ...
Embodiment 2
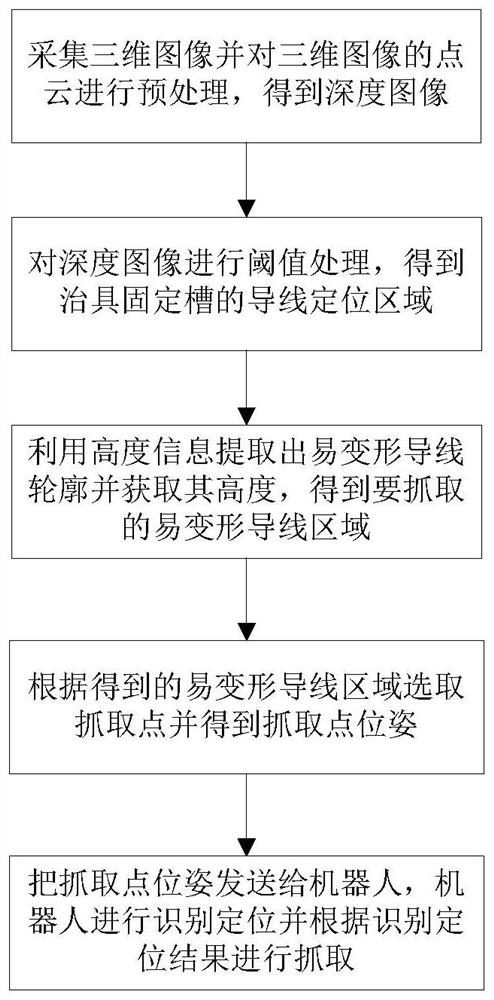
[0110] like figure 2 As shown, a method for identifying, locating, and grasping deformable wires is implemented based on the device for identifying, locating, and grasping deformable wires, including the following steps:
[0111] S1: Collect a 3D image and preprocess the point cloud of the 3D image to obtain a depth image;
[0112] S2: Perform threshold processing on the fixed height in the depth image to obtain the wire positioning area of the fixture fixing groove;
[0113] S3: Using the height information to extract the outline of the easily deformable wire and obtain its height, and obtain the area of the easily deformable wire to be grasped;
[0114] S4: Select the grasping point according to the obtained easily deformable wire area and obtain the pose of the grasping point;
[0115] S5: Send the pose of the grasping point to the robot, and the robot performs identification and positioning and grasps according to the identification and positioning results.
[0116...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More