

Mechanical arm machining part placing device and grabbing method
A technology for robotic arms and parts, applied in the field of robotic arm processing parts placement devices and grasping, can solve the problems of low efficiency of manual methods, high cost of vision systems, complex structure of mechanical pressing mechanisms, etc., so as to improve grasping accuracy, cost saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
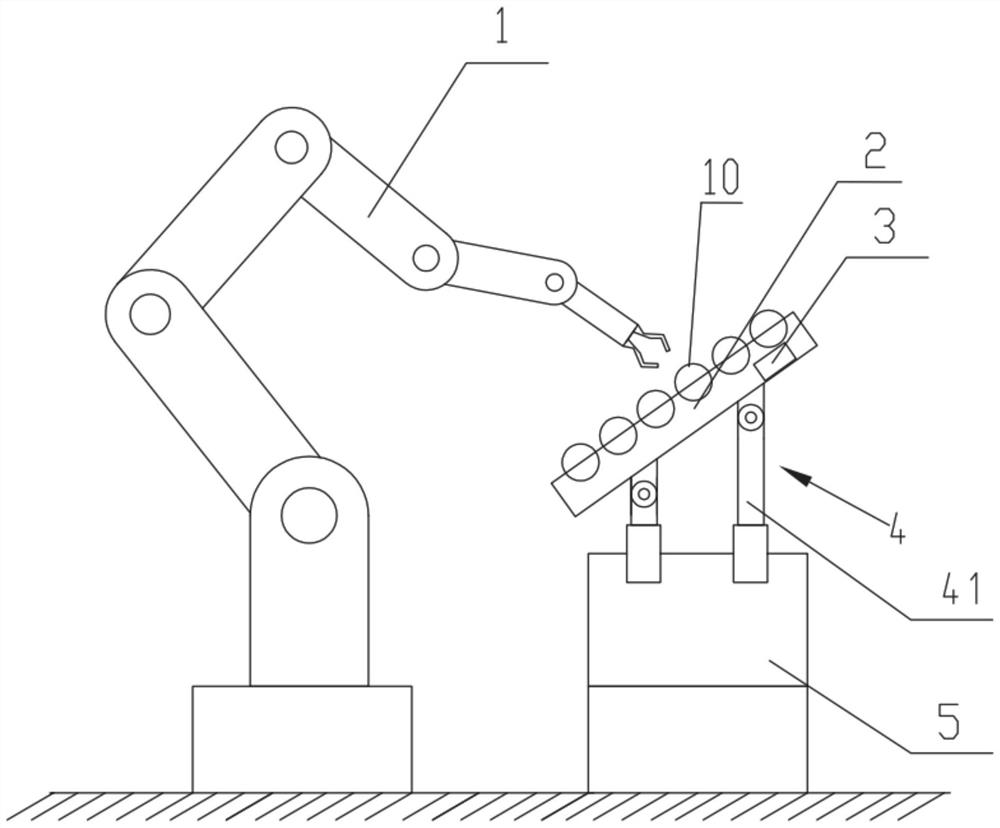
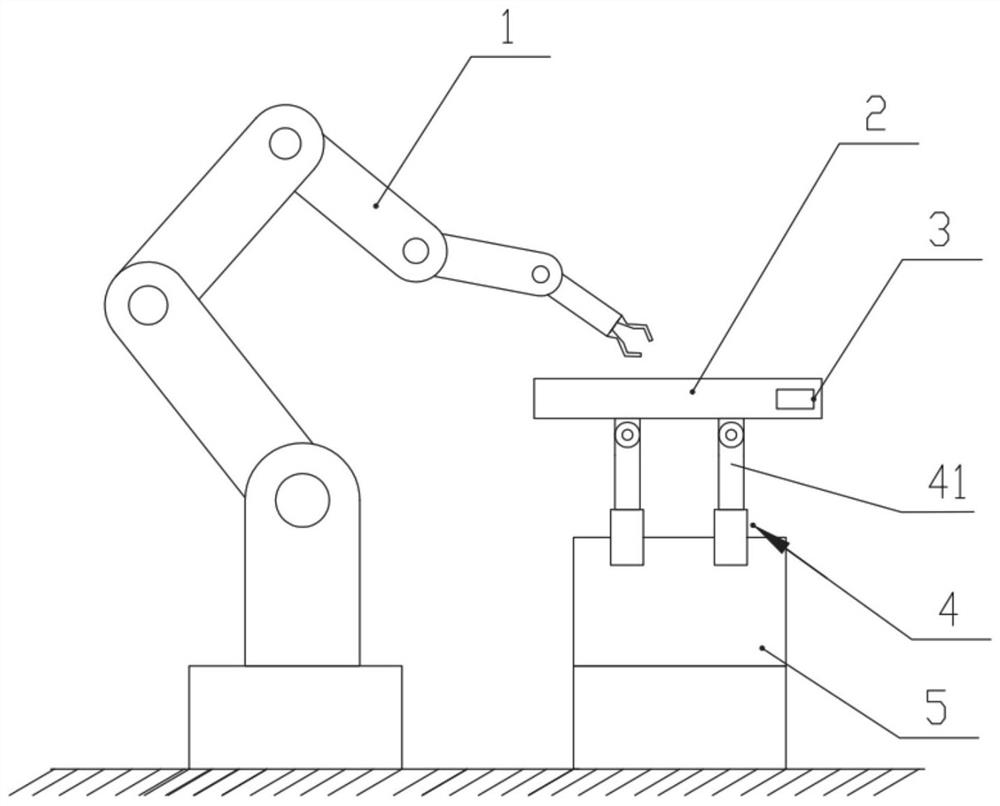
[0025] see Figure 1-6 . The mechanical arm processing parts placement device includes a mechanical arm 1, a material shelf tray 2, a telescopic assembly 4 arranged under the material shelf tray 2, and a device for detecting the inclination angle of the material shelf tray 2 in the material shelf tray 2. Attitude detector 3, the materi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More